Соответственно этому будут
параллельны и линии узлов ![]() (как линии пересечения
параллельных плоскостей). Но тогда одноименные углы Эйлера для различных
полюсов будут равны друг другу в любой момент времени:
(как линии пересечения
параллельных плоскостей). Но тогда одноименные углы Эйлера для различных
полюсов будут равны друг другу в любой момент времени:
![]()
![]() , что и доказывает теорему.
, что и доказывает теорему.
3°. Матрица поворотов.
Возьмем в
начальный момент ![]() сопутствующие оси
сопутствующие оси ![]() совпадающими по направлению с
соответствующими неподвижными осями
совпадающими по направлению с
соответствующими неподвижными осями ![]() , так что их ортами
будут
, так что их ортами
будут ![]() . Тогда ориентацию подвижных осей
. Тогда ориентацию подвижных осей ![]() (их ортов
(их ортов ![]() ) в
рассматриваемый момент
) в
рассматриваемый момент ![]() можно получить из начальной
можно получить из начальной ![]() с помощью следующих трех поворотов: на
угол
с помощью следующих трех поворотов: на
угол ![]() вокруг оси
вокруг оси ![]() , затем
на угол
, затем
на угол ![]() вокруг оси
вокруг оси ![]() и,
наконец, на угол
и,
наконец, на угол ![]() вокруг оси
вокруг оси ![]() (Рис.17).
(Рис.17).
|
При первом
повороте орты ![]() переходят в орты
переходят в орты ![]() , связанные с исходными ортами
преобразованиями
, связанные с исходными ортами
преобразованиями
![]() ,
, ![]() ,
, ![]() .
.
Эти три равенства представимы матричной зависимостью
![]()
![]() ,
, 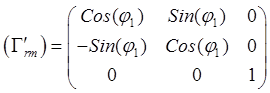 .
.
При втором
повороте орты ![]() преобразуются в орты
преобразуются в орты ![]() в виде
в виде
![]()
![]() ,
, 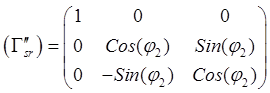 .
.
Наконец, при
третьем повороте орты ![]() перейдут в орты
перейдут в орты ![]() так, что
так, что
![]()
![]() ,
, 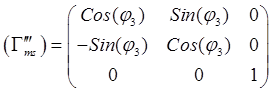 .
.
Таким образом,
орты ![]() и
и ![]() связаны
преобразованием
связаны
преобразованием
![]()
![]() ,
, ![]() ,
(10.2)
,
(10.2)
матрица которого равна произведению трех предыдущих матриц и, следовательно, может быть выражена через эйлеровы углы:
 . (10.3)
. (10.3)
Таким образом,
заданными эйлеровыми углами элементы ![]() -матрицы однозначно
определяются. Обратно, задание
-матрицы однозначно
определяются. Обратно, задание ![]() - матрицы однозначно
определяет эйлеровы углы. Действительно, в этом случае согласно (10.3) будем
иметь равенства
- матрицы однозначно
определяет эйлеровы углы. Действительно, в этом случае согласно (10.3) будем
иметь равенства
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() , которые в интервалах
, которые в интервалах
![]() ,
, ![]() ,
, ![]()
определяют углы Эйлера формулами
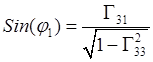 ,
,  ;
; ![]() ;
;
 ,
,  .
(10.4)
.
(10.4)
Из условий ортонормированности
элементов ![]() , а также
, а также ![]() и формул
(10.2) следуют отношения
и формул
(10.2) следуют отношения
 , правые части которых с помощью
транспонированной матрицы
, правые части которых с помощью
транспонированной матрицы ![]() ,
, ![]() можно представить в виде матричного
произведения
можно представить в виде матричного
произведения
![]() или
или ![]() ,
(10.5)
,
(10.5)
где ![]() , а
, а ![]() – единичная матрица. Отсюда следует, что
трансформированная матрица совпадает с обратной матрицей:
– единичная матрица. Отсюда следует, что
трансформированная матрица совпадает с обратной матрицей: ![]() , т.е.
, т.е. ![]() является
ортогональной матрицей.
является
ортогональной матрицей.
Элементам ![]() -матрицы можно придать определенный
геометрический смысл. Из формул (10.2) следуют соотношения
-матрицы можно придать определенный
геометрический смысл. Из формул (10.2) следуют соотношения
![]() ,
(10.6)
,
(10.6)
из которых ясно, что эти элементы совпадают с косинусами углов между подвижными и неподвижными осями.
4°. Уравнения движения точек тела.
Уравнения (10.1)
движения твердого тела позволяют установить уравнения движения любой его точки.
Сопутствующая система координат ![]() неизменно связана с
телом, поэтому тело в этой системе покоится. Это значит, что координаты
неизменно связана с
телом, поэтому тело в этой системе покоится. Это значит, что координаты ![]() любой точки
любой точки ![]() тела в ней
остаются неизменными во все время движения. Следовательно, тройкой чисел-координат
тела в ней
остаются неизменными во все время движения. Следовательно, тройкой чисел-координат
![]() можно определять точку тела. Тем самым
сопутствующая система координат позволяет не только устанавливать положение
тела в пространстве, но и определять (индивидуализировать) точки тела.
можно определять точку тела. Тем самым
сопутствующая система координат позволяет не только устанавливать положение
тела в пространстве, но и определять (индивидуализировать) точки тела.
Возьмем
некоторую точку ![]() тела и установим уравнения ее движения.
Обозначим через
тела и установим уравнения ее движения.
Обозначим через ![]() и
и ![]() ее вектор-радиусы
в неподвижной и в сопутствующей системах, а через
ее вектор-радиусы
в неподвижной и в сопутствующей системах, а через ![]() – вектор-радиус
полюса
– вектор-радиус
полюса ![]() (Рис.18). Тогда из векторного треугольника
(Рис.18). Тогда из векторного треугольника
![]() будем иметь векторное уравнение движения
этой точки
будем иметь векторное уравнение движения
этой точки
![]() . (10.2)
. (10.2)
Для получения координатных уравнений движения точки представим входящие в (10.2) векторы в базисе системы отсчета. Имеем, очевидно,
![]() ,
, ![]() ,
, ![]() .
.
![]() Здесь вектор
Здесь вектор
![]() представлен в базисе сопутствующих осей,
где точка
представлен в базисе сопутствующих осей,
где точка ![]() определена координатами
определена координатами ![]() .Для получения разложения этого вектора в
системе отсчета, воспользуемся разложением (10.2) ортов
.Для получения разложения этого вектора в
системе отсчета, воспользуемся разложением (10.2) ортов ![]() в
базисе
в
базисе ![]() . Тогда для вектора
. Тогда для вектора ![]() будем
иметь
будем
иметь  и (10.2) после подстановки в него
разложений векторов примет вид
и (10.2) после подстановки в него
разложений векторов примет вид
 .
.
Так как равные векторы в одном и том же базисе имеют равные компоненты, отсюда следуют зависимости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.