Явные алгоритмы.Явные самонастраивающиеся алгоритмы, такие как алгоритм 8.1, сходятся к решению, если оценки параметров сходятся к истинным значениям. Это так, если при оценке параметров используется корректная модель, а входной сигнал имеет достаточно богатый частотный спектр. Кроме того, поскольку при оценивании используется МНК, необходимо, чтобы возмущения были некоррелированы, т. е. чтобы в (8.7) выполнялось условие С = 1. Далее, поскольку управляющий сигнал генерируется звеном обратной связи, для "обогащения" его частотного спектра может потребоваться введение определенных возмущений.
Анализ системы первого порядка. Для иллюстрации принципиальной схемы анализа самонастраивающихся регуляторов начнем с систем первого порядка.
Предположим, что динамика объекта управления и внешние воздействия описываются простой моделью первого порядка:
|
у(k) + a×y(k - 1) = b×u(k -1) + e(k) + c×e(k - 1), |
(8.8) |
где и - управляющая переменная, у - выход, a {e(k)} - последовательность независимых нормально распределенных случайных чисел. Предположим, кроме того, что целью управления является минимизация квадратичной функции потерь:
|
|
(8.9) |
Будем считать, что допустимые управления таковы, что u(k) зависит от всех "прошлых" выходов y(k), y(k - 1), ... . Если параметры модели известны, то оптимальное управление реализуется пропорциональным регулятором
|
|
(8.10) |
Рассмотрим самонастраивающийся регулятор с настройкой параметра q с помощью МНК по модели:
|
y(k) + q×y(k - 1) = u(k - 1) + e(k). |
(8.11) |
Среднеквадратическая
оценка ![]() , полученная по
данным, имеющимся для моментов времени до k - i
включительно, т. е. по y(k), у(k-1), ...., у(1), u(k-1),
u(k-2), ..., u(1), определяется выражением
, полученная по
данным, имеющимся для моментов времени до k - i
включительно, т. е. по y(k), у(k-1), ...., у(1), u(k-1),
u(k-2), ..., u(1), определяется выражением
|
|
(8.12) |
Оптимальное управление для задачи (8.9)-(8.11) имеет вид
и(k)
= ![]() (k)×
у(k),
(k)×
у(k),
если известно значение q. Если же значение q неизвестно, то оно заменяется оценкой и управление принимает вид
|
u(k) = |
(8.13) |
Можно ожидать, что алгоритм управления (8.12)-(8.13) будет хорошо работать, если с = 0 и b= 1. В этом случае среднеквадратическая оценка q сходится к а приk®¥, а оценка управления сходится к u(k)=ay(k), т. е. в силу (8.10) - к оптимальному управлению.
Замечательное
свойство алгоритма (8.12)—(8.13) состоит в том, что он сходится к оптимальному
управлению (8.10) даже тогда, когда с¹ 0. Этот факт иллюстрируется на
рис. 8.2, где показана оценка параметра q для а = - 0,9; b = 3 и с = - 0.3.
Отметим, что оценка q сходится к ![]() = -0,2, а не к
значению а, равному –0,9. Значение
= -0,2, а не к
значению а, равному –0,9. Значение ![]() =
-0,2 соответствует управлению, минимизирующему
дисперсию ошибки.
=
-0,2 соответствует управлению, минимизирующему
дисперсию ошибки.
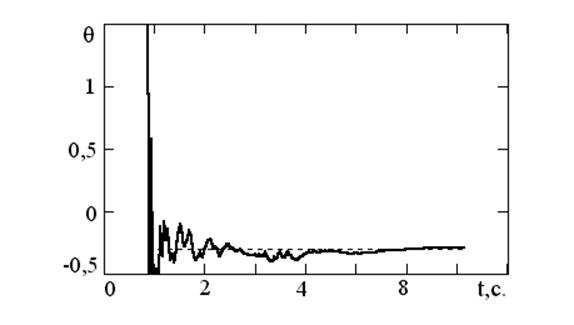
Рис. 8.2.
Для сравнения самонастраивающегося регулятора с оптимальным регулятором, полученным при известных точных значениях параметров, вычислим значение функционала
для самонастраивающегося регулятора и оптимального регулятора
u(k) = -0,2×y(k).
Рассмотренный пример показывает, что простой самонастраивающийся регулятор (8.12)-(8.13) обладает очень хорошими характеристиками. После короткого переходного периода он ведет себя практически так же, как и оптимальный регулятор с точными значениями параметров. При этом параметр q, судя по всему, сходится к значению, соответствующему регулятору, минимизирующему дисперсию ошибки.
Проведем эти эмпирические рассуждения на более формальном уровне. Предположим, что система описывается уравнением
|
y(k+1) + a×y(k) = u(k) + n(k), |
(8.14) |
где п - возмущение. Если возмущение ограничено в том смысле, что
|
|
(8.15) |
то среднеквадратическое значение выхода замкнутой системы
|
|
(8.16) |
также ограничено.
Это
утверждение можно доказать рассуждением от противного.
Если у не ограничено, то влиянием n(k)
в (8.14) можно пренебречь. Тогда ![]() будет
сходиться к
а.
Выбрав управление вида
будет
сходиться к
а.
Выбрав управление вида
u(k) = a×y(k),
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 .
. .
.
 ,
,