Wyf = 
Задача 2.1. Усилительное звено воспроизводит без искажения и запаздывания, но с изменением масштаба (с увеличением или уменьшением) входную величину. Для усилительных звеньев зависимость между выходной и входной величинами описывается соотношение
х2 = k× x1.
Определите передаточную функцию и частотные характеристики усилительного звена.
Задача 2.2. Интегрирующее звено имеет следующее дифференциальное уравнение
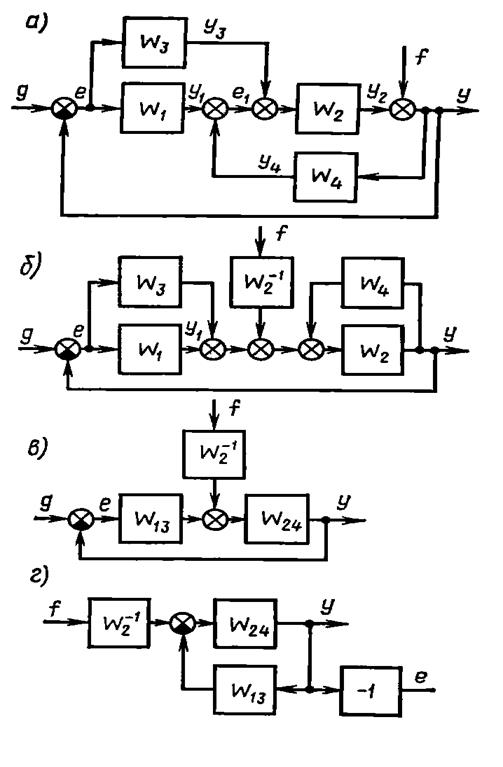
Рис. 2.14.
dx2/dt = k× x1,
где k - передаточный коэффициент, представляющий отношение скорости изменения выходной величины к входной величине.
Определите передаточную функцию и частотные характеристики интегрирующего звена.
Задача 2.3. Определите передаточную функцию и
частотные характеристики дифференцирующего RC-контура, выходной сигнал ![]() которого связан с входным сигналом
которого связан с входным сигналом ![]() уравнением
уравнением
 .
.
Задача 2.4. Определите передаточную функцию и частотные характеристики апериодического звена (рис. 2.15), которое имеет следующее дифференциальное уравнение
 ,
,
где х1 - входной сигнал; х2 - выходной сигнал.
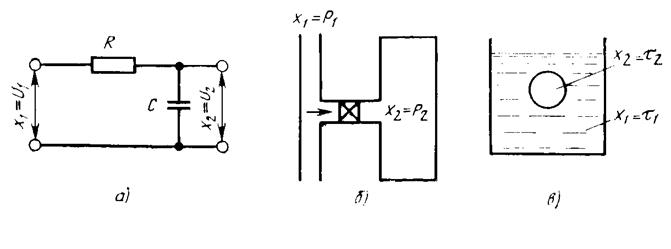
Рис. 2.15.
Появление цифровых управляющих вычислителей постепенно привело к изменению как структуры, так и функций автоматизированного управления. В результате создания мощных управляющих вычислителей и необходимого математического обеспечения их применение для управления объектами существенно расширилось. В настоящее время вычислители являются неотъемлемой частью автоматизированных систем управления. При этом характернымрезультатом применения управляющих вычислителейявилась централизация управления, т. е. выполнение всех необходимых функций на одном вычислителе.
С появлением дешевых микропроцессоров открылась возможность решения задач управления объектами на нескольких вычислителях. Это привело к разработке децентрализованного управления. Начали выпускаться микроЭВМ, специально предназначенные для контроля и управления объектами с несколькими управляемыми переменными. Они стали использоваться вместо аналоговых устройств и мини-ЭВМ на нижних уровнях иерархической структуры управления объектами. В настоящее время сфера их использования расширяется, и микроЭВМ оказывают и будут оказывать существенное влияние на развитие теории и техники измерений и управления.
Квантование информации. Данные, обрабатываемые управляющими ЭВМ, предварительно квантуются по времени и преобразуются в цифровую форму. Следовательно, они представляют собой дискретные сигналы, квантовые как по времени, так и по амплитуде, что иллюстрируется рисунком 3.1.
В отличие от непрерывных сигналы, поступающие в ЭВМ, принимают дискретные значения в дискретные моменты времени. Таким образом формируется последовательность амплитудно-модулированных импульсов, высота каждого из которых пропорциональна величине непрерывного сигнала. В аналогово-цифровом преобразователе (АЦП) значение амплитуды импульса подвергается либо округлению, либо усечению в зависимости от типа устройства.
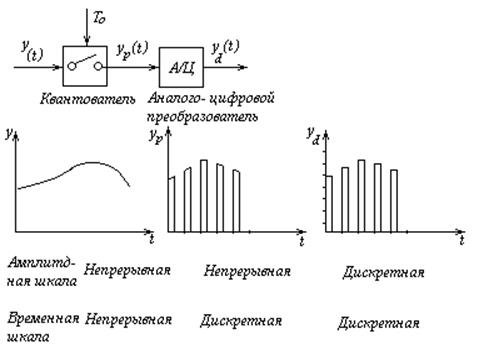
Рис. 3.1.
Квантование по времени обычно представляет собой периодический процесс, характеризующейся тактом дискретности Т0. Эта операция выполняется мультиплексором, конструктивно объединенным с устройством автоматического масштабирования АЦП. Оцифрованные входные данные поступают далее в центральный процессор. Здесь они обрабатываются по запрограммированным алгоритмам, в результате чего формируются выходные данные. Если исполнительное устройство имеет аналоговый вход, эти данные поступают в цифроаналоговый преобразователь (ЦАП), на выходе которого имеется фиксатор (эстраполятор нулевого порядка). Упрощенная блок-схема описанной системы изображена на рисунке 3.2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.