В автоматической системе, объект управления которой отличается большой инерционностью, возникшее отклонение удается компенсировать рассматриваемым способом только в течение некоторого интервала времени. В результате погрешность управленияможет достигать значительной величины, приводя к ухудшению качества рабочего процесса и технико-экономических показателей САУ. В этом случае эффективно применение комбинированного управления по возмущению и отклонению (рис.1.4).
Комбинированное управление объединяет преимущества обоих принципов - быстроту реакции на изменение возмущений и точное регулирование, независимо от того, какая причина вызвала отклонение. Дополнительная связь по возмущению позволяет ускорить процесс управления и уменьшить отклонения управляемой переменной.
Комбинированное управление применяют, например, в системах демодуляции частотно модулированных сигналов с автоподстройкой частоты.
 |
Рис. 1.4.
На первом этапе развития техники управления использовался практически лишь один способ - поддержание заданного постоянного значения регулируемой переменной. В дальнейшем число способов управления увеличилось и вполне вероятно, что описанные далее основные способы не исчерпывают возможные их виды в будущем.
По характеру алгоритма функционирования автоматические системы делят на стабилизирующие, программные, следящие, экстремальные, адаптивные и оптимального управления.
Стабилизирующие системы предназначены для поддержания постоянного значения управляемой величины с заданной точностью при неизменном задающем воздействии.
Значение управляемой величины, предусмотренное алгоритмом функционирования автоматической системы, называется предписанным, а измеренное (фактическое) - действительным. Отклонения управляемой величины от предписанного значения обусловлены возмущающими воздействиями среды на объект управления. Стабилизирующие САУ реализуют принцип управления по отклонению. Они могут предусматривать перенастройку режима путем изменения уровня задающего воздействия. Алгоритм функционирования при этом остается неизменным, а управляющее устройство обеспечивает соответствие между значениями управляемой величины и задающего воздействия.
Примером стабилизирующей системы регулирования является генератор частотно-модулированных сигналов (частотно модулированных сигналов) с обратной связью по частоте (рис. 1.5).
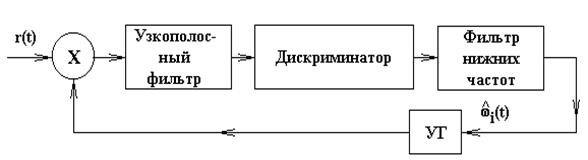
Рис. 1.5.
Следящие системы - это такие системы, у которых управляемая переменная y(t) изменяется в соответствии с задающим воздействием y0(t), формируемым по произвольному, заранее не известному закону. Следящая система может быть выполнена на основе любого фундаментального принципа управления. Она отличается от соответствующей программной системы лишь тем, что вместо устройства формирования программы в ней используется устройство слежения за изменением некоторого внешнего фактора - задающего воздействия.
Следует отметить, что одна и та же автоматическая система в зависимости от настройки задающего устройства может реализовать различные алгоритмы функционирования.
Следящие системы также могут быть статическими и астатическими. Однако поскольку задающее воздействие y0(t) в этих системах непрерывно изменяется, то понятия астатической и статической характеристик управления теряют смысл. Для этих систем важны другие виды погрешностей, которые будут рассмотрены позже.
Примером следящей системы является демодулятор частотно модулированных сигналов, который содержит полосовой фильтр с регулируемой средней частотой (рис. 1.6).
Рис. 1.6.
В
состав демодулятора входят резонансный контур с конденсатором переменной
емкости, дискриминатор и фильтр нижних частот. На выходе дискриминатора
формируется оценка ![]() средней частоты
колебаний принимаемого сигнала r(t). Эту оценку используют для
подстройки средней частоты, как показано на рисунке 1.6. Нетрудно усмотреть,
что данная система отслеживает мгновенную частоту колебаний принимаемого сигнала
r(t).
К недостаткам такого демодулятора следует отнести то, что он может "потерять"
входной сигнал r(t),
если оценка
средней частоты
колебаний принимаемого сигнала r(t). Эту оценку используют для
подстройки средней частоты, как показано на рисунке 1.6. Нетрудно усмотреть,
что данная система отслеживает мгновенную частоту колебаний принимаемого сигнала
r(t).
К недостаткам такого демодулятора следует отнести то, что он может "потерять"
входной сигнал r(t),
если оценка ![]() неверна. Как и в
случае обычного дискриминатора частотно модулированных сигналов, при реализации
варианта системы со следящим фильтром могут встретиться трудности с построением
дискриминатора, обладающего достаточной точностью в широкой полосе частот.
неверна. Как и в
случае обычного дискриминатора частотно модулированных сигналов, при реализации
варианта системы со следящим фильтром могут встретиться трудности с построением
дискриминатора, обладающего достаточной точностью в широкой полосе частот.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.