Выше говорилось, что входное воздействие не может влиять на неуправляемую часть системы. Покажем, что введение обратной связи также не позволяет устранить эту трудность.
Рассмотрим структурную схему системы с обратной связью (рис. 5.13), состоящую из управляемой S1 и неуправляемой S2 частей.
Уравнения системы в разомкнутом состоянии
![]()
![]()
![]()
Учитывая, что e=g - y, уравнения системы в замкнутом состоянии

y = [C1C2]×[x1x2]T.
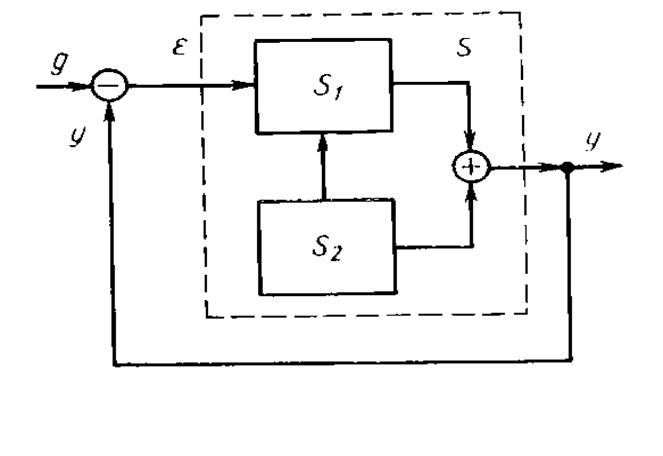
Рис. 5.13.
При этом ее характеристическое уравнение
det [s×I - A1+ B1×C1]× det [s×I - A2] = 0.
Корни последнего уравнения состоят из корней управляемой части замкнутой системы (первый множитель) и неуправляемой части разомкнутой системы (второй множитель).
Таким образом, введение обратной связи не повлияло на динамику неуправляемой части. К аналогичному выводу можно прийти и по отношению к ненаблюдаемой части.
Пример. 5.1. Рассмотрим систему S, образованную подсистемами Sa и Sb. Пусть подсистемы имеют следующее математическое описание:
![]()
![]()
y1a = x1a;
y2a = x1a;
y1 = x1b.
Тогда уравнения системы S в пространстве состояний имеют вид
y1 = [0 1]×x,
из которых видно, что система S неуправляемая и ненаблюдаемая.
Одной из основных задач теории автоматического управления является изучение динамических процессов, происходящих в системах управления. САУ всегда подвергается действию внешних возмущающих сил, которые могут вывести систему из состояния равновесия. Устойчивость САУ является одним из основных условий ее работоспособности и включает требование затухания во времени переходных процессов. Система с расходящимся процессом будет неработоспособной.
В простейшем случае понятие "устойчивость" системы связано со способностью ее возвращаться (с определенной точностью) в состояние равновесия после исчезновения внешних сил, которые вывели систему из этого состояния. Если система неустойчива, то она не возвращается в состояние равновесия, из которого ее вывели, либо совершает вокруг него недопустимо большие колебания.
Наглядно устойчивость равновесия представлена на рисунке 3.1, где изображен шар, расположенный в некотором углублении (рис. 3.1, а), на некоторой выпуклой поверхности (рис. 3.1, б), на плоскости (рис. 3.1, в).
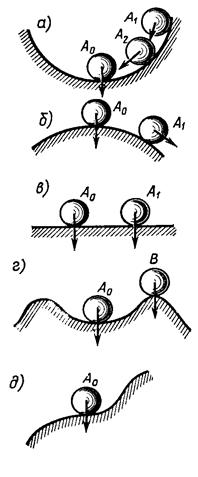
Рис. 3.1.
Положение равновесия шара характеризуется точкой A0. В случае, изображенном на рисунке 3.1, а, при всяком отклонении шара от положения равновесия, например, в точку A1, он будет стремиться возвратиться к положению равновесия - в точку A0 (при отсутствии сил трения) или к некоторой конечной области, окружающей положение равновесия, например в точку A2 (при наличии сил трения). Такое положение равновесия устойчиво. Случай, изображенный на рисунке 3.1, б, соответствует неустойчивому положению равновесия. Рисунок 3.1, в соответствует нейтральному (безразличному) положению равновесия. На рисунке 3.1, г сотояниеравновесия устойчиво лишь до тех пор, пока отклонение не вышло за некоторую границу, определенную, например, точкой B.
Поэтому в общем случае, рассматривая нелинейные системы, вводят термины "устойчивость в малом", "устойчивость в большом" и " устойчивость в целом".
Система"устойчива в малом", если констатируют лишь факт наличия области устойчивости, но не определяют каким-либо образом ее границы (рис 3.1, г). Систему называют "устойчивой в большом", когда определены границы области устойчивости, т. е. определены границы области начальных отклонений, при которых система возвращается в исходное состояние, и выяснено, что реальные начальные отклонения принадлежат этой области. В том случае, когда система возвращается в исходное состояние при любых начальных отклонениях, систему называют "устойчивой в целом" (рис 3.1, а). "Устойчивость в целом" для определенного класса нелинейностей называют "абсолютной устойчивостью". Очевидно, что система, "устойчивая в целом", будет "устойчива в большом" и " устойчива в малом"; система, "устойчивая в большом", будет "устойчива в малом".
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.