|
y = Cx, |
(5.16) |
C = 
Уравнение (5.13) в развернутой форме имеет вид

…………………………………………………………

…………………………………………………………

Из этих уравнений следует, что переменная xj может быть определена по переменным y1, y2, . . . , yp, если коэффициенты cij (для i = 1, 2, . . . , p) не все равны нулю. Другими словами, xj является наблюдаемой переменной, если элементы j-го столбца матрицы С не все равны нулю, или линейная, стационарная система является наблюдаемой, если матрица выхода С не содержит столбцов, элементы которых равны нулю.
Условия наблюдаемости в общем случае определяются следующей теоремой (или критерием).
Необходимые и достаточные условия для полной наблюдаемости системы (5.13) состоят в том, чтобы матрица
|
R = [CT, ATCT, (A2)2, . . . , (AT)n-1CT] |
(5.16) |
имела ранг n.
Из выражения (5.16) очевидно, что наблюдаемость определяется свойствами матриц А и С. Так же как и в случае критерия управляемости, если матрица R имеет ранг n для некоторого m< n, т. е.
|
rang Rm = rang[CT, ATCT, . . . , (AT)u-1CT] = n, |
(5.17) |
то наименьшее m, при котором имеет место равенство (5.16), называется показателем наблюдаемости.
Любая система, описываемая уравнениями состояния (5.13), может быть представлена в виде структурной схемы, изображенной на рисунке 5.9.
Значение понятий "управляемость" и "наблюдаемость". Возможно существование двух особых значений или мод (одной неуправляемой при s = 1 и другой - ненаблюдаемой при s = -1). Для простой одномерной системы неуправляемость и ненаблюдаемость легко обнаружить непосредственно по ее уравнениям или структурной схеме (рис. 5.3).
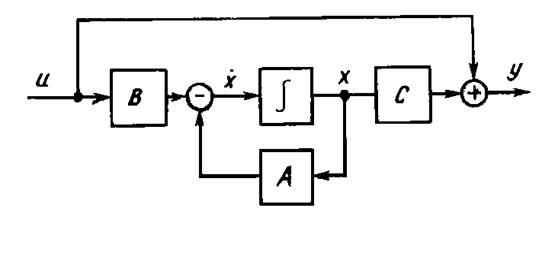
Рис. 5.9.
Рассмотрим теперь пример, когда система описывается передаточной функцией. Эта система, состоящая из двух последовательно соединенных подсистем с передаточными функциями
 ;
; 
показана на рис. 5.10.
Рис. 5.10.
Передаточная функция системы

или
После сокращений нули и полюса при s = ± 1 выпали из рассмотрения. Однако такое сокращение полюса и нуля возможно лишь теоретически. На самом же деле такое сокращение не учитывает образование диполя (рис. 5.11). Если этот диполь расположен в левой полуплоскости вблизи точки -a, то ему в переходном процессе будет соответствовать член вида re-at, где r - вычет, связанный с полюсом. Последний очень мал, так как вблизи полюса расположен нуль. В большинстве случаев этим членом можно пренебречь. Если же диполь расположен в правой полуплоскости, то он даст неустойчивый член reat , каким бы малым r не было.
Заметим, что если по стрелке (от входа к выходу) сначала расположен нуль, а затем полюс, как, например при s = 1, то имеет место неуправляемость. А если по стрелке сначала расположен полюс, а затем нуль, как, например при s = -1, то имеет место, ненаблюдаемость.
В случае многомерных систем с многими входами и выходами, когда сокращение может происходить в результате свойств определителей, обнаружение неуправляемости и ненаблюдаемости гораздо сложнее. Однако во всех случаях это происходит из-за тех или иных сокращений между подсистемами. Следует подчеркнуть различие между неуправляемыми (или ненаблюдаемыми) полюсами (или нулями) в зависимости от того, расположены они в левой или в правой полуплоскости.
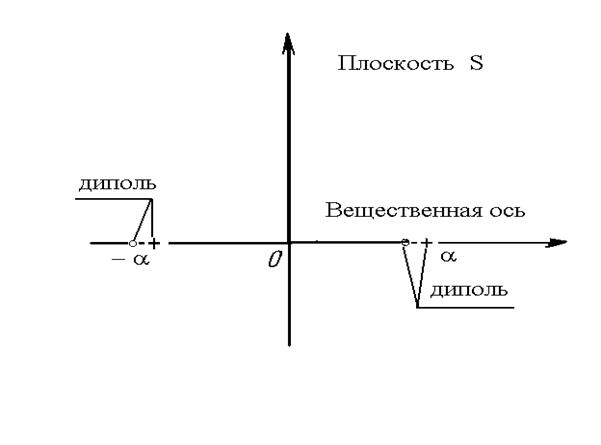
Рис. 5.11.
Предположим, что в системе имеется наблюдаемый, но не управляемый неустойчивый полюс. Так как он наблюдаем, то выход неустойчив. Он не может быть не замечен, но его неуправляемость исключает возможность управления системой. В этом случае выходом из положения может быть не изменение закона регулирования, а изменение структуры системы.
Предположим теперь, что система имеет управляемый, но не наблюдаемый неустойчивый полюс. Так как этот полюс не связан с выходом, то выход будет наблюдаться как устойчивый. Но тем не менее, внутренняя неустойчивость системы может привести к аварии, когда неустойчивая переменная достигнет определенной амплитуды, либо к появлению эффекта насыщения из-за выхода системы из линейной зоны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.