где:
 ;
;
![]() .
.
Из сравнения уравнений (I) и (3.1) получим алгоритм вычисления
вектора функций ![]() , входящих в уравнения формирования
управляющего воздействия
, входящих в уравнения формирования
управляющего воздействия ![]() :
:
![]() ,
,
или (так как ![]() ):
):
![]() .
(3.3)
.
(3.3)
Но из уравнений (6) и (7) видно, что
 .
(3.4)
.
(3.4)
Поэтому из выражений (3.3) и (3.4) получим следующий алгоритм настройки параметров ПИ-регулятора:
 .
(3.5)
.
(3.5)
Результаты вычислений при
![]() приведены на графиках изменения оценок параметров
ПИ-регулятора:
приведены на графиках изменения оценок параметров
ПИ-регулятора:
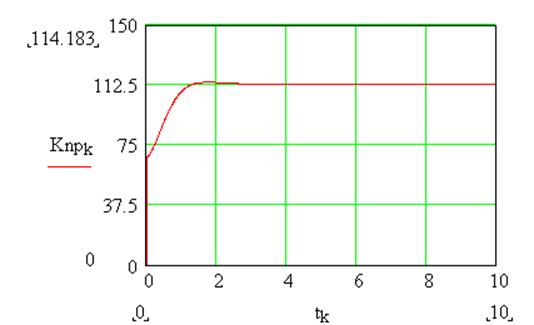
Рис.4. График изменения оценок параметра Kn
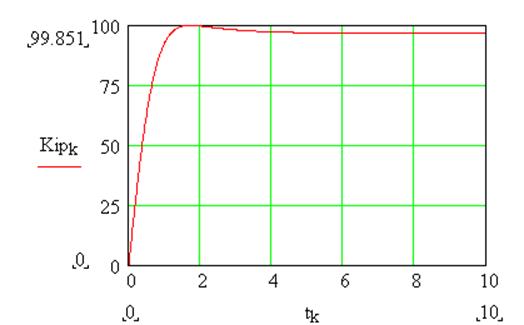
Рис.5. График изменения оценок параметра Ku
Из
графиков видно, что получены состоятельные оценки параметров ПИ-регулятора.
Окончательные значения оценок таковы: ![]() ;
; ![]() .
.
5. Анализ системы управления
по прямым показателям качества управления
Составим дискретную модель системы управления. Системе дифференциальных уравнений (b), (c), (d) соответствуют разностные уравнения:
![]() ;
(3.1)
;
(3.1)
![]() ;
(3.2)
;
(3.2)
![]() ;
(3.3)
;
(3.3)
![]() ; k=1,
2, …, N. (3.4)
; k=1,
2, …, N. (3.4)
В цикле по переменной ![]() решить
на ЭВМ систему уравнений (3.1)-(3.4), (5) с помощью математического пакета Mathcad.
решить
на ЭВМ систему уравнений (3.1)-(3.4), (5) с помощью математического пакета Mathcad.
Построить графики переходных процессов для управляемой
переменной ![]() , требуемого закона изменения управляемой
переменной
, требуемого закона изменения управляемой
переменной ![]() , относительной погрешности управления
, относительной погрешности управления  % и управляющего воздействия
% и управляющего воздействия ![]() .
.
На рис. 6 приведен график изменения относительной погрешности управления.
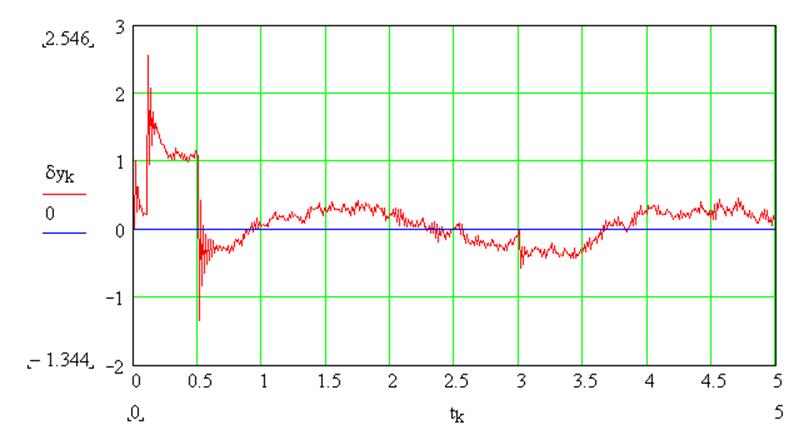
Рис.6. График изменения относительной погрешности управления
По графикам переходных процессов определить прямые показатели качества управления.
Вычислить среднее значение погрешности управления:
и среднее квадратическое значение погрешности управления за время управления:
 .
.
5. Составить отчет по результатам выполнения задания.
4. Материалы по промежуточному контролю знаний по дисциплине
Контрольная работа №1
Вариант №1
1. Изобразите схему САУ, реализующей принцип программного управления, и поясните реализацию этого принципа управления.
2. Понятие "АЧХ". Алгоритм определения АЧХ по заданной передаточной функции.
3.
Определите
передаточную функцию двух звеньев с передаточными функциями  и
и  ,
соединенных последовательно.
,
соединенных последовательно.
Вариант №2
1. Изобразите схему САУ, реализующей принцип управления по отклонению, и поясните реализацию этого принципа управления.
2. Понятие "ФЧХ". Алгоритм определения ФЧХ по заданной передаточной функции.
3. Определите передаточную функцию системы, изображенной на рисунке,
где передаточная функция  .
.

Вариант №3
1. Изобразите схему САУ, реализующей принцип управления по возмущению, и поясните реализацию этого принципа управления.
2. Алгоритм определения передаточной функции системы, образованной параллельным соединением звеньев.
3. САУ имеет математическую модель
![]()
Выполните анализ управляемости САУ.
Вариант №4
1. Изобразите схему САУ, реализующей принцип комбинированного управления, и поясните реализацию этого принципа управления.
2. Изобразите схему системы, образованной последовательным соединением звеньев. Алгоритм определения передаточной функции этой системы.
3. САУ имеет математическую модель
![]()
Выполните анализ наблюдаемости САУ.
Вариант №5
1. Математическая модель апериодического звена.
2. Изобразите схему системы, образованной соединением звеньев с обратной связью. Алгоритм определения передаточной функции этой системы.
3. Составьте передаточную функцию САУ, которая имеет математическую модель
 .
.
Вариант №6
1. Понятие "передаточная функция системы".
2. Понятие "устойчивая система".
3. САУ имеет математическую модель
![]()
Выполните анализ управляемости САУ.
Вариант №7
1. Алгоритм определения характеристического уравнения по заданному дифференциальному уравнению.
2. Математическая модель пропорционального звена.
3. САУ имеет математическую модель
![]()
Выполните анализ наблюдаемости САУ.
Вариант №8
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.