




















































Введение
Теория машин и механизмов (ТММ) занимается изучением машин и механизмов на уровне их схем, т.е. без детального рассмотрения подробностей конструктивной реализации. В дальнейшем мы будем использовать различные виды схем. Среди них будем различать: структурные схемы – они могут выполняться без соблюдения масштаба и показывают лишь взаимосвязи между отдельными частями машины или механизма; кинематические схемы – выполняются с соблюдением масштаба.
Дадим некоторые самые общие определения.
 |
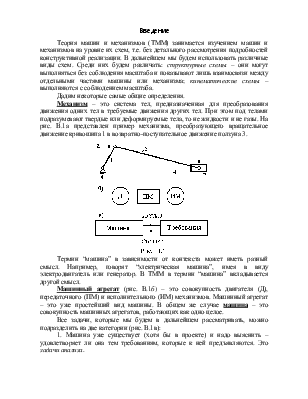
Термин “машина” в зависимости от контекста может иметь разный смысл. Например, говорят “электрическая машина”, имея в виду электродвигатель или генератор. В ТММ в термин “машина” вкладывается другой смысл.
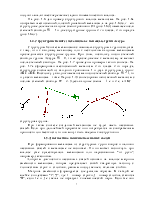
Машинный агрегат (рис. В.1б) – это совокупность двигателя (Д), передаточного (ПМ) и исполнительного (ИМ) механизмов. Машинный агрегат – это уже простейший вид машины. В общем же случае машина – это совокупность машинных агрегатов, работающих как одно целое.
Все задачи, которые мы будем в дальнейшем рассматривать, можно подразделить на две категории (рис. В.1в):
1. Машина уже существует (хотя бы в проекте) и надо выяснить – удовлетворяет ли она тем требованиям, которые к ней предъявляются. Это задачи анализа.
2. Существует совокупность требований, предъявляемых к машине или механизму, надо создать такую машину или механизм, который отвечал бы указанным требованиям. Это задачи синтеза.
Задачи анализа, как правило, решаются однозначно. Задачи же синтеза гораздо сложнее и часто имеют несколько решений. Более того, для синтеза механизма или машины часто требуется пройти несколько циклов “синтез – анализ”. Для того, чтобы можно было пройти достаточно большое количество таких циклов и найти оптимальные решения требуются системы автоматизированного проектирования, реализующие на компьютерах все требуемые расчеты и проектные операции. ТММ изучает самые общие закономерности, лежащие в основе перечисленных задач.
Данная работа является именно конспектом лекций, а не учебником по ТММ. Поэтому здесь, как правило, не приводятся исчерпывающие классификации, а только примеры. При решении задач рассматриваются не все возможные расчетные случаи, а только основные. Предполагается, что читатель будет знакомиться с указанной литературой, а подробные примеры будут рассмотрены на практических занятиях.
Глава 1
В этой главе рассматриваются основные понятия, относящиеся к строению механизмов.
1.1. Основные определения
Звено – это деталь или группа деталей, соединенных между собой неподвижно, т.е. звено представляет собой одно твердое тело. На рис. В.1а представлен пример четырехзвенного механизма, где 1 – кривошип, 2 – шатун, 3 – ползун, 4 – стойка.
В механизмах звенья образуют друг с другом подвижные соединения. Подвижное соединение двух звеньев называется кинематической парой. В примере на рис. В.1а звенья образуют четыре кинематические пары: 1 – кривошип со стойкой (вращательная), 2 – кривошип с шатуном (вращательная), 3 – шатун с ползуном (вращательная), 4 – ползун со стойкой (поступательная).
Кинематические пары классифицируются по двум признакам [1,9, 14, 18].
1. По количеству ограничений, накладываемых кинематической парой на относительное движение звеньев, входящих в кинематическую пару. По этой классификации класс кинематической пары и равен количеству ограничений, накладываемых кинематической парой на относительное движение звеньев. Поскольку свободное тело в пространстве имеет 6 степеней свободы, то в принципе существует 5 классов кинематических пар. Однако практическое применение имеют как правило лишь пары 5, 4 и 3 класса.
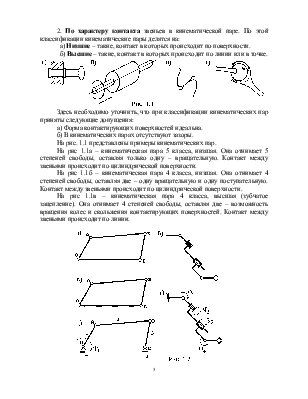
2. По характеру контакта звеньев в кинематической паре. По этой классификации кинематические пары делятся на:
а) Низшие – такие, контакт в которых происходит по поверхности.
б) Высшие – такие, контакт в которых происходит по линии или в точке.
 |
а) Форма контактирующих поверхностей идеальна.
б) В кинематических парах отсутствуют зазоры.
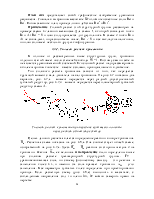
На рис. 1.1 представлены примеры кинематических пар.
На рис 1.1а – кинематическая пара 5 класса, низшая. Она отнимает 5 степеней свободы, оставляя только одну – вращательную. Контакт между звеньями происходит по цилиндрической поверхности.
На рис 1.1б – кинематическая пара 4 класса, низшая. Она отнимает 4 степеней свободы, оставляя две – одну вращательную и одну поступательную. Контакт между звеньями происходит по цилиндрической поверхности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.