3. Внешней нагрузкой для силового расчета кривошипа 1 (рис. 3.1,г) будет R21 – реакция в шарнире А1 со стороны 2-го звена на 1-е, найденная на предыдущем шаге. Решением уравнений равновесия кривошипа определяем реакции в его опоре О.
3.3. Внешние силы
Расчет внешних сил во многих случаях является отдельной задачей, относящейся к специальным наукам. Например, на рис. 3.1,а изображен механизм пресса. Технологическая сила, приложенная к пуансону во время выполнения операции штамповки, вытяжки и т.п. зависит от многих факторов: материала заготовки, скорости процесса, площади обработки и т.д. Расчет такого рода сил изучается в механике сплошной среды. Для всех машин технологические нагрузки вычисляются с помощью соответствующих математических моделей тех процессов, для выполнения которых машина предназначена, поэтому здесь и при выполнении курсового проекта мы будем полагать технологическую силу заданной.
По графику, имеющемуся в техническом задании определяете значение FТ в расчетном положении.
Силы тяжести вычисляются по известной формуле
Gi = mi g , где: mi – масса i-го звена, g – ускорение свободного падения.
Инерционная нагрузка для звеньев механизмов в общем случае состоит из двух компонент. Сил инерции:
![]()
где: aSi – ускорение
центра масс i-го звена,
![]()
и инерционных моментов; для плоских
механизмов:
где: JSi – момент инерции i-го звена, ei – его угловое ускорение.
Знак минус указывает на то, что инерционная нагрузка направлена противоположно ускорению.
При выполении силового расчета в курсовом проекте силами трения можно пренебречь.
После вычисления сил инерции и тяжести их следует проанализировать. В курсовом проекте примем следующий критерий: те силы, которые более чем в 30 раз меньше технологической силы будем считать пренебрежимо малыми.
3.3.1. Силовой расчет структурных групп
Структурная группа типа "шатун – ползун"
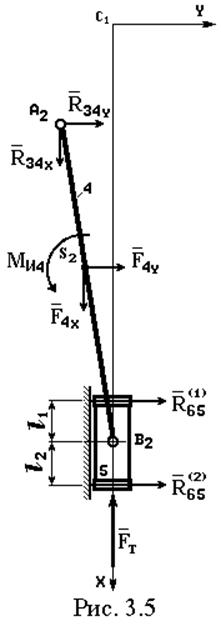
Расчет этой группы в курсовом проекте произведем аналитическим методом. Расчетная схема представлена на рис. 3.5. Реакции в направляющих ползуна зависят от его конструкции. В данном случае реакции перемещаются по направляющим вместе с ползуном. Рабочие длины l1, l2 (см. рис. 3.5) являются конструктивными параметрами. Вы их задаете сами.
 Решение удобно получить в НСК OXY, ось X которой параллельна оси
ползуна, а начало координат поместим в центр опоры C1. Уравнение равновесия структурной группы в целом в
виде равенства нулю суммы всех сил, на нее действующих:
Решение удобно получить в НСК OXY, ось X которой параллельна оси
ползуна, а начало координат поместим в центр опоры C1. Уравнение равновесия структурной группы в целом в
виде равенства нулю суммы всех сил, на нее действующих:
или в проекциях на оси OXY:
![]() R34x + F4x–
FT = 0 ;
R34x + F4x–
FT = 0 ;
R34y + F4y + R65(1) + R65(2) = 0 .
Из первого уравнения сразу определяется составляющая R34x. Равновесие шатуна 4 в виде равенства нулю суммы моментов всех сил относительно точки В2:
–R34x (yA – yB) + R34y (xA – xB) – F4x (yS2 – yB) + MИ4 + + F4y (xS2 – xB) = 0. ( 3.9 )
Её направление определяется графически.
Для определения реакций R65(1), R65(2) составим систему уравнений, первое из которых отражает равновесие ползуна 5 в виде равенства нулю суммы проекций всех сил на ось Y, а второе – равенство нулю суммы моментов всех сил относительно точки В:
![]() R65(1) + R65(2) = 0;
R65(1) + R65(2) = 0;
–R65(1) l1 + R65(2) l2 – FТ (yS3 – yB) = 0 .
Решая систему (3.10) найдем реакции R65(1), R65(2).
Трехшарнирная структурная группа
Расчет этой группы в курсовом проекте произведем графоаналитическим методом планов сил.
Рассмотрим случай, характерный для курсовых проектов,
когда силы тяжести и инерции пренебрежимо малы по сравнению с усилием R43. Расчетная схема
представлена на рис. 3.6,а. Реакция R34 была найдена при расчете предыдущей структурной
группы и ![]() .
.
Назовем нормальным – направление вдоль оси звена, касательным – перпендикулярно оси. На рис. 3.6,а показаны нормальные n2, n3 и касательные t2, t3 направления для звеньев 2 и 3. Реакции в шарнире A1 – R12 и в шарнире C1 – R63, неизвестные как по величине, так и по направлению, будем искать в проекциях на эти направления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.