 |
Откуда, учитывая, что угол между осями сателлитов: jW = 2p/n W, получаем:
( 5.27 )
Условие сборки. Это условие накладывает ограничение на сочетание чисел зубьев колес так, чтобы, во-первых, обеспечить собираемость механизма, т.е. все зубья сателлитов должны точно входить во впадины ответных колес. А во-вторых, должен существовать период, через который в точности повторяются все фазы зацепления, что увеличивает долговечность передачи.
 Для схемы A это
условие выражается как:
Для схемы A это
условие выражается как:
( 5.28 )
где C – любое целое число.
 Для схем B и C для упрощения сборки обычно
назначают числа зубьев центральных колес кратными nW.
Однако есть и более мягкие условия.
Для схем B и C для упрощения сборки обычно
назначают числа зубьев центральных колес кратными nW.
Однако есть и более мягкие условия.
Для схем B и C:
( 5.29 )
где знак + берется для схем с разноименными зацеплениями, в частности для схемы B, знак “–” – для схем с одноименными зацеплениями, в частности схемы C.
Условие ( 5.29 ), полученное В.В. Добровольским и предполагающее наиболее простую технологию сборки иногда (хотя и редко) дает отрицательный результат для механизмов, которые могут быть собраны. Известны и другие, например, условие Меррита:
( 5.30 )
Однако, при использовании условия ( 5.30 ) нужно дополнительно рассчитывать, какие конкретно зубья сателлитов с какими впадинами центральных колес должны зацепляться.
Для механизмов схем B и C с двухвенцовыми сателлитами описанные условия сборки необходимо выполнять, когда сателлиты изготавливаются цельными (рис. 5.18б) или венцы жестко фиксируются в одном блоке при сборке. Иногда, особенно в приборных конструкциях делается штифтовое крепление венцов (рис. 5.18в). В этом случае при сборке венцы поворачивают друг относительно друга, подбирая необходимое положение. В этом случае при подборе чисел зубьев условия сборки можно не соблюдать.
Волновыми называются механизмы, в составе есть которых упруго деформируемые колеса. По структуре эти механизмы можно отнести к планетарным. Приведем основные термины.
Колесо, которое в процессе работы упруго деформируется – называется гибким колесом.
Колесо, которое в процессе работы не деформируется – называется жестким.
Звено, деформирующее гибкое колесо и с точки зрения структуры являющееся водилом здесь называется генератором волн деформации или просто генератором.
Существует две схемы волновых механизмов:
а) С неподвижным гибким колесом.
б) С неподвижным жестким колесом.
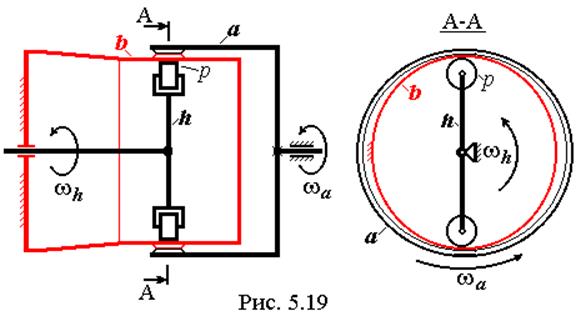
Рассмотрим схему с неподвижным гибким колесом, как более распространенную. Структурная схема такого механизма представлена на рис. 5.19, где а – жесткое колесо, b – гибкое колесо, h – генератор волн, р – ролики.
Входным звеном в этих механизмах является генератор волн (h). Т.к. внешний диаметр генератора делается несколько большим, чем внутренний диаметр гибкого колеса, то генератор, с усилием вставленный внутрь колеса b, деформирует его. При его вращении генератора – вращается деформация гибкого колеса, а т.к. число зубьев колеса b (Zb) делается на 1 … 3 зуба меньше, чем Za, то за каждый оборот генератора происходит разворот колеса а относительно колеса b. Например, если Za – Zb = 1, то за полный оборот генератора h колесо а разворачивается относительно колеса b на угол, соответствующий шагу зацепления.
 |
Поскольку по структуре это планетарные механизмы, то можно воспользоваться формулой ( 5.22 ), тогда
( 5.31 )
Диапазон передаточных отношений. Из формулы ( 5.31 ) имеем:

( 5.32 )
где dB – деформация гибкого колеса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.