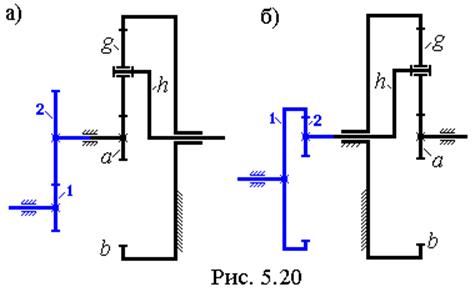
Таким образом, деформация гибкого колеса обратно пропорциональна величине передаточного отношения. Следовательно, с ростом передаточного отношения уменьшается деформация гибкого колеса. Но как видно из рис. 5.19 (сечение A-A) его деформация должна быть достаточной, чтобы колеса a и b выходили из зацепления там, где генератор не воздействует на колесо b. Для того, чтобы это обеспечить при больших передаточных отношениях – колесо b надо изготавливать очень тонким. По этой причине передаточное отношение волновых механизмов обычно не превышает iha(b) < 300.
С уменьшением передаточного отношения увеличивается деформация гибкого колеса. Но т.к. она должна оставаться в пределах упругих деформаций материала, то обычно удается создавать механизмы с iha(b) > 70.
Преимущества волновых механизмов.
1. Возможность создания механизмов с очень большим передаточным отношением в очень малых габаритах.
2. Возможность создания герметичных передач без уплотнения подвижных элементов.
Эти свойства предопределили применение этих механизмов, например, для привода вращения антенн космических аппаратов.
Недостатки волновых механизмов.
1. Невозможность создания механизмов с малым передаточным отношением.
2. При малых габаритах передачи получаются мелкомодульными, с ограниченными возможностями по передаче крутящих моментов.
Под “сложными” здесь будем понимать зубчатые механизмы, представляющие собой последовательное соединение механизмов рассмотренных выше типов (рядные, с промежуточными колесами, планетарные, волновые).
 |
 |
 |
Постановка задачи силового расчета в самом общем виде будет дана позже при рассмотрении силового расчета рычажных механизмов. При силовом расчете зубчатых механизмов решают три основные задачи:
1. Расчет крутящих моментов на валах.
2. Определение усилий в зацеплениях.
3. Определение реакций в опорах валов.
5.9.1. Расчет крутящих моментов на валах
Рассмотрим сначала машинный агрегат, в который входит двигатель (Д), рядный зубчатый механизм и некоторый исполнительный механизм (ИМ), рис. 5.21. И решим две конкретные часто встречающиеся задачи.
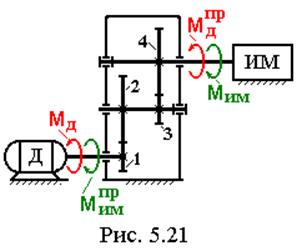 1. Пусть нам известен момент, развиваемый
двигателем MД, а нас интересует –
какой момент при этом поступит на исполнительный механизм MДПР.
Такое приведение момента с одного вала на другой производится по формуле:
1. Пусть нам известен момент, развиваемый
двигателем MД, а нас интересует –
какой момент при этом поступит на исполнительный механизм MДПР.
Такое приведение момента с одного вала на другой производится по формуле:
MДПР = MД i14 h14 ( 5.33 )
где i14 – передаточное отношение между колесами 1,4, h14 – КПД передачи.
2. Пусть нам известен момент, сопротивления исполнительного механизма MИМ, а нас интересует – какой момент должен при этом развивать двигатель MИМПР.
MИМПР = MИМ / i14 h14 ( 5.34 )
Теоретическое обоснование формул ( 5.33 ), ( 5.34 ) будет дано позже при рассмотрении метода приведения в главе, посвященной динамике машин с абсолютно жесткими звеньями.
В планетарных механизмах схем В и С (см. рис. 5.16, 5.17) на валах сателлитов тоже действуют крутящие моменты. При их определении следует иметь ввиду, что в этих механизмах нагрузка распределяется на все сателлиты, поэтому момент на их валах:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.