В дальнейшем будут использоваться результаты резонансных испытаний. Из теории колебаний известно (см., например [ 10, 12 ]), что при резонансе амплитуда колебаний такой системы:
( 6.14 )
Приближенное равенство в выражении ( 6.14 ) справедливо для так называемых слабо демпфированных систем, когда k >> n. Балансировочные станки конструктивно выполняются именно такими.
 В процессе экспериментов датчиком 6 (см. рис. 6.5)
будет замеряться не угол поворота рамы, а амплитуда колебаний точки установки
датчика:
В процессе экспериментов датчиком 6 (см. рис. 6.5)
будет замеряться не угол поворота рамы, а амплитуда колебаний точки установки
датчика:
( 6.15 )
Таким образом, мы показали, что амплитуда A резонансных колебаний пропорциональна дисбалансу DK с некоторым пока неизвестным коэффициентом пропорциональности m.
Для нахождения величины дисбаланса DK применим метод трех разгонов.
Ротор устанавливают на балансировочный станок так, чтобы плоскость I проходила через шарнирную опору 4. Двигателем 3 ротор разгоняют в зарезонансную область, т.е. до частоты вращения w1 заведомо большей, чем k и дают выбег. В процессе выбега, когда ротор медленно тормозится система проходит через резонанс w1 = k. Датчиком 6 замеряют амплитуду резонансных колебаний. Обозначим ее: AK.
Далее на роторе устанавливают дополнительную, так называемую пробную массу известной величины mП. После этой операции ротор получает дисбаланс: _ _ _
D1 = DK + DП ( 6.16 )
После этого на роторе в то же место устанавливают удвоенную пробную массу 2mП. После этой операции дисбаланс ротора:
_ _ _
D2 = D1 + DП ( 6.17 )
Изобразим ситуацию графически. На рис. 6.6а представлен ротор и показан изначальный дисбаланс, характеризующийся неизвестными параметрами mK, rK и пробные массы mП, 2mП, расположенные на известном расстоянии rП.
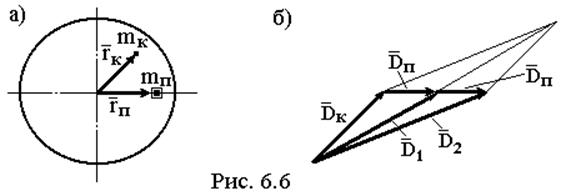
DK2 + D22 = 2 DП2 + 2 D12
 |
 или
или
Отсюда
( 6.18 )
 |
Для уравновешивания надо в плоскости II установить противовес, имеющий дисбаланс такой же по величине, но противоположный по направлению.
После этого, ротор переустанавливается так, что меняются местами плоскости I – II и все описанные операции повторяются для расчета и установки противовеса в плоскости I.
Глава 7
Динамика как раздел механики изучает движение тел под действием сил во времени. Это очень обширный раздел, в котором рассматривается много различных задач. Здесь мы рассмотрим только одну из них.
7.1. Постановка задачи
 |
Поскольку в данном случае число степеней свободы системы W = 1, то достаточно определить закон движения одного ведущего звена. Характер же движения остальных звеньев можно будет определить методами кинематики.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.