 |
 Если требуется обеспечить некоторое определенное
значение коэффициента виброизоляции, то
Если требуется обеспечить некоторое определенное
значение коэффициента виброизоляции, то
( 8.23 )
8.8. Системы ударо- и виброзащиты
Для защиты оборудования от ударов и вибрации применяют три вида систем:
1. Пассивные.
2. Активные.
3. Регулируемые.
Пассивные системы – это установка оборудования на амортизаторы, которые рассчитываются так, как мы рассматривали выше.
8.8.1. Активные системы
Упрощенная схема такой системы изображена на рис. 8.15, где m – защищаемый объект, ГЦ – гидроцилиндр, ДУ – датчик ускорения, У – усилитель, ДП – датчик перемещения, АЦП – аналого-цифровой преобразователь, К – компьютер, ЦАП – цифро-аналоговый преобразователь, ЭМУ – электромеханический усилитель, ЗК – золотниковая коробка, p – гидравлическая магистраль высокого давления.
Защищаемый объект установлен на штоке гидроцилиндра. Датчики ускорения и перемещения постоянно находятся в рабочем состоянии, регистрируют текущее ускорение и перемещение объекта и передают сигналы на ЦАП, который преобразует аналоговые сигналы в виде меняющегося напряжения в массивы чисел. Эти массивы передаются на компьютер, который их обрабатывает, анализирует и, если ускорения и перемещения приобретают угрожающий характер, принимает решение о создании противодействия. Согнал об этом с помощью ЦАП из цифрового преобразуется в аналоговый. С помощью ЭМУ усиливается и преобразуется в механическое движение золотника. Золотник, перемещаясь, соединяет разные полости гидроцилиндра с магистралью высокого давления. Таким образом и создается противодействие.
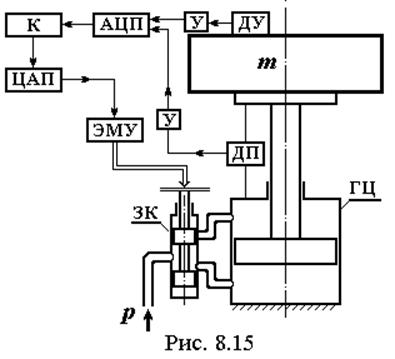
Т.е. основной особенностью активной системы –
это создание противодействия тому воздействию, которое пришло на объект.
8.8.2. Регулируемые системы
По своей схеме регулируемые системы похожи на активные. Упрощенная схема такой системы изображена на рис. 8.16, где m – защищаемый объект, ПДА – пневмодемпфирующий амортизатор, ДУ – датчик ускорения, У – усилитель, ДП – датчик перемещения, АЦП – аналого-цифровой преобразователь, К – компьютер, ЦАП – цифро-аналоговый преобразователь, ЭМУ – электромеханический усилитель, УУД – устройство управления давлением, p – пневматическая магистраль высокого давления.
В данном случае защищаемый объект установлен на так называемом пневмодемпфирующем амортизаторе, который состоит из сильфона 1 и пневмоаккумулятора 2, которые соединены клапаном и дросселирующем отверстием. Параметры амортизатора, в частности его жесткость зависят от внутреннего давления.
Датчики ускорения и перемещения постоянно находятся в рабочем состоянии, регистрируют текущее ускорение и перемещение объекта и передают сигналы на ЦАП, который преобразует аналоговые сигналы в виде меняющегося напряжения в массивы чисел. Эти массивы передаются на компьютер, который их обрабатывает, анализирует и, если ускорения и перемещения приобретают угрожающий характер, принимает решение о том, как надо изменить параметры ПДА. Согнал об этом с помощью ЦАП из цифрового преобразуется в аналоговый. С помощью ЭМУ усиливается и преобразуется в сигналы управления давлением воздуха в ПДА.
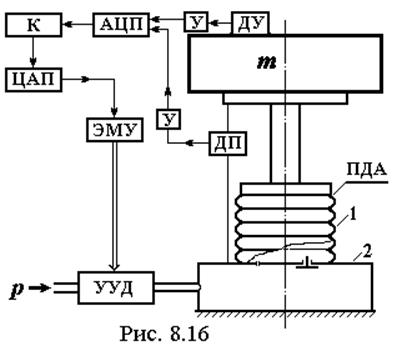
Т.е. основной особенностью регулируемые системы
– это изменение параметров амортизирующей подвески так, чтобы минимизировать
последствия воздействия, которое пришло на объект.
[1] Вопросы, связанные с углами давления в кинематических парах мы будем рассматривать позднее.
[2] Направление отсчета углов противоположно направлению вращения кулачка.
[3] Действие этого момента можно наблюдать при выполнении фигуристками упражнения “волчок”. Фигуристка начинает вращение с раскинутыми руками, а потом их сводит и при этом резко увеличивается ее скорость вращения. Когда фигуристка сводит руки – уменьшается момент инерции ее тела. Уравнение (7.16) и показывает, что при уменьшении момента инерции возникающий при этом момент MjПР является движущим, а при увеличении – тормозящим.
[4] Не путать с моментом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.