Для подавления непрерывного помехового колебания в общем случае с неизвестной структурой в РПрУ наиболее широко применяются одноканальные или многоканальные корреляционные автокомпенсаторы (МАК) (разд. 5). Контроль качества работы таких автокомпенсаторов может быть произведен путем измерения уровня не скомпенсированного остатка помехи РПвых на выходе АК при постоянном уровне помехи Рпвх на его входе, т. е. путем измереиия коэффициента подавления помехи Kп = Pп вх/Рп вых. Однако, так как значение KП, как правило, составляет не менее 20 дБ, то точное измерение малого уровня РПВых либо Uп вых требует применения прецизионной измерительной аппаратуры. Поэтому наиболее широкое применение получила схема измерения Ко, представленная на рис. 6.20. С целью упрощения технической реали-
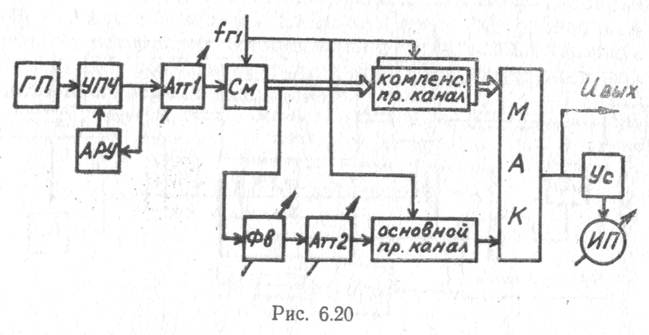
зации генератор помехи ГП, как правило, выполняется на промежуточной частоте. Величина коэффициента усиления УПЧ, необходимого для получения требуемого превышения помехи над полезным сигналом, определяется реализуемым значением Кп, Пусть
Kп>=20 дБ, тогда из выражения Kп~1/1— р2 следует, что р2>= 0,99. Последнее неравенство представим в виде (3.53)
где q02, qk2--отношения помеха-шум по мощности на входах основного и компенсационных приемных каналов соответственно.
Обозначая q02≈, qk2= h, перепишем последнее выражение в виде

Из последнего неравенства следует, что h>=198(23 дБ).
Система АРУ обеспечивает стабильный уровень помехи на входах основного и компенсационного приемных каналов, определяющий точность установки числителя в выражении для Кп. Аттенюатор АТТ1 позволяет произвести регулировку этого уровня в пределах линейного участка амплитудных характеристик приемных трактов. Преобразование частоты помехи на рабочую частоту приемников производится, как правило, с помощью повышающего преобразователя частоты, гетеродином которого является 1-й гетеродин РПрУ. Контрольный усилитель на выходе МАК необходим для индикации малого уровня не скомпенсированното остатка помехи на измерительном приборе ИП.
Измерение Кп включает в себя два этапа. На первом этапе при выключенной цепи обратной связи МАК с помощью регулируемого АТТ1 и ИП устанавливается требуемое превышение h по" мехи над собственными шумами РПрУ (затухание β1 аттенюатора и показание ИП запоминаются). На втором этапе цепь обратной связи МАК замыкается, что приводит к резкому уменьшению показаний ИП. Устанавливая прежнее показание ИП с помощью регулируемого АТТ1, снимают новое показание его затухания β2, после чего определяют K п = β1 — β2.
Регулируемые фазовращатель ФВ и аттенюатор АТТ2 на входе основного приемного канала позволяют измерить Кп при различных соотношениях амплитуд и начальных фаз помеховых колебаний в основном и компенсационных приемных каналах.
6.6. Измерение пороговой чувствительности
Величина пороговой чувствительности (Рпор) является обобщенным параметром приемного устройства (разд. 1) и определяется для каждого набора фиксированных значений вероятности правильного обнаружения (Pd) и ложной тревоги (РF). Поэтому измерение Рпор производится в два этапа (рис. 6.21). Вначале на
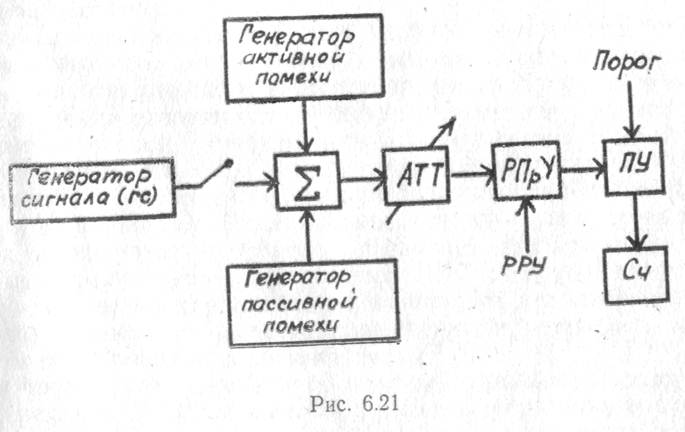
вход приемного устройства полезный сигнал не подается и пороговое устройство срабатывает лишь по внутренним шумам, а также не скомпенсированным активным и пассивным помехам. Число превышений порога (я) за фиксированное количество циклов обнаружения (N) подсчитывается счетчиком и определяет вероятность ложной тревога Р?= W.
Получение требуемого значения Pf достигается с помощью ручной регулировки усиления приемника (РРУ), либо путем изменения 'порога обнаружения.
При подаче на вход приемника полезного сигнала большого уровня (Рвх >> Pпред ) число превышений порога будет близко к N, а вероятность правильного обнаружения — к единице. Увеличивая затухание аттенюатора (β), добиваются получения заданного значения вероятности правильного обнаружения. При этом
Автоматизация измерения Рпор может быть достигнута путем использования электрически управляемого аттенюатора, а также включения вместо ручной регулировки усиления — шумовой системы АРУ, стабилизирующей значение Pf
Поскольку указанные измерения носят вероятностный характер, то они осуществляются в течение достаточно большого интервала времени (числа циклов обнаружения Л), чтобы доверительные вероятности для получения оценок были близки к единице.
ЗАКЛЮЧЕНИЕ
В данном учебнике «Приемно-передающие устройства радиотехнических систем» части 1 и 2 в соответствии с программой учебной дисциплины с позиций радиолокационной системотехники излагаются вопросы теории и принципы построения приемно-передающих систем, проблемы их технической реализации на современной и перспективной элементной базе, связанные с выполнением жестких технических требований, предъявляемых к радиолокационному (вооружению, функционирующему ,в сложной целевой и помеховой обстановке.
Важным аспектом содержания учебной дисциплины является изложение вопросов эксплуатации и ремонта приемно-передающих трактов радиотехнического вооружения, контроля функционирования и измерения основных технических параметров, определяющих тактико-технические характеристики вооружения. В этой связи перспективными являются методы унификации 'построения приемно-передающих систем на основе использования принципа функциональной модульности. Рациональное сочетание аналоговых, дискретных и цифровых устройств позволяет сделать структурные элементы передатчиков и приемников РЛС адаптивными, с изменением технических характеристик в широком диапазоне параметров в зависимости от области применения и решаемых задач в конкретных условиях функционирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.