207
Если пренебречь потерями на временную дискретизацию, что допустимо при Fт ≥ (3...4)Δfс (подразд. 2.6), то отношение сигнал-шум по напряжению на выходе цифрового знакового коррелятора определяется формулой
где
Так как цифровые коды на выходах счетчиков являются случайной величиной с биномиальным законом распределения, который при большом N может быть аппроксимирован нормальным, то порог обнаружения выбирается в соответствии с (3.10) Сравнение полученного цифрового кода с порогом реализуется путем отбрасывания определенного числа младших разрядов. Число этих разрядов «к» определяется, например, условной вероятностью ложной тревоги, которая может быть представлена в виде F=2k/2n. Тогда
![]()
Для ранее рассмотренного случая n=12 и F=10-3 число отбрасываемых разрядов равно двум.
Релейный коррелятор обеспечивает вычисление цифрового кода, пропорционального релейной корреляционной функции
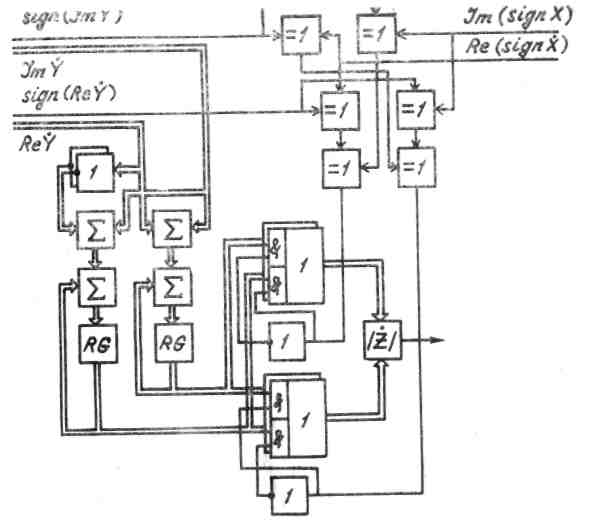
Из данного выражения следует, что лишь один из перемножаемых сигналов (обычно колебания обобщенного гетеродина) квантуется на два уровня. Поэтому структурная схема цифрового релейного коррелятора (рис. 3.45) сложнее, чем у знакового, и содержит перемножитель знаков двух сигналов на четырех ИМС «исключающее ИЛИ», управляющий работой двух многоразрядных мультиплексоров на два входа. Входными сигналами мультиплексоров являются сумма ImY+ReY и разность ImY-ReY, необходимые для вычисления релейной корреляционной функции
Накопление выборок суммы и разности реальной и мнимой части комплексной амплитуды принимаемого сигнала Y произво-
208
дится в накапливающих сумматорах, установленных на входах с мультиплексоров. Коды выходных сигналов мультиплексоров поступают на схему вычисления модуля корреляционной суммы. .Связь между релейной корреляционной функцией и истинным коэффициентом корреляции ρxy двух сигналов при нормальном законе их распределения и достаточно большом времени накопления NTT →∞ определяется соотношением [18]

3.4.1. Особенности построения приемных устройств непрерывных сигналов
Непрерывные сигналы, как и длинноимпульсные, обеспечивают большую энергию сигнала и хорошую разрешающую способность по скорости. Однако использование непрерывных сигналов приводит к определенным трудностям при построении приемного устройства Во-первых, прием слабых эхо-сигналов необходимо производить на фоне мощных зондирующих колебаний. Во-вторых, для согласованной обработки непрерывных колебаний необходимо сохранять их когерентность в течение длительного времени накопления τсэ (3.52).
Решение проблемы одновременного приема и передачи может быть достигнуто путемиспользования раздельных, экранированных или разнесенных передающей и приемной антенн. Эти меры обеспечивают развязку между ними порядка 100 дБ. Однако и в этом случае в приемный тракт просачивается мощность зондирующего сигнала, гораздо большая мощности эхо-сигналов or удаленной цели. Необходима дополнительная режекция (подавление) прямых сигналов передатчика, а также сигналов, отраженных от местных предметов (проникающих сигналов). В основу режекции может быть положено наличие доплеровского сдвига частоты Fдц у полезного эхо-сигнала и отсутствие Fд у проникающих сигналов. Подавление сигналов с нулевыми доплеровскими частотами наиболее просто может быть реализовано как в корреляционно-фильтровом приемнике РЛС обнаружении (рис. 3.42), так и в корреляционно-фильтровом приемнике РЛС сопровождения (рис. 3.46) после сжатия сигналов по спектру
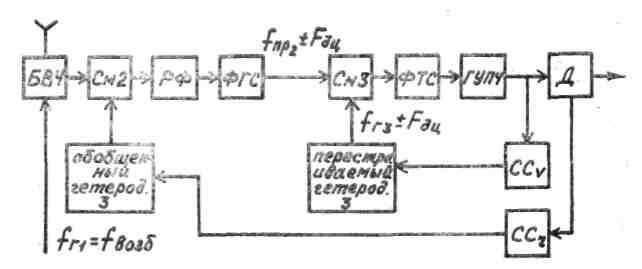
Рис, 3.46
Элементы приемного канала, расположенные до перемножителя (См 2), должны пропускать весь спектр полезного сигнала, т. е. быть широкополосными. Кроме того, ввиду наличия мощных проникающих сигналов они должны иметь большой динамический диапазон, т. е. их усиление во избежание перегрузки должно быть небольшим. Минимальное значение коэффициента усиления БВЧ определяется лишь допустимым коэффициентом шума приемника. После сжатия сигналов по спектру в См2 производится режекция проникающих сигналов в режекторном фильтре, настроенном на номинальное значение второй промежуточной частоты fnp20 (рис. 3.47). При этом сжатый спектр полезного сигнала, имеющего любой положительный либо отрицательный доплеровский сдвиг частоты Fдц, проходит через фильтр грубой селекции ФГС с полосой пропускания ±Fд макс. Так как Я ФГС много больше ширины спектра сжатого сигнала Δfсж, то этот фильтр не может выполнить роль интегратора. Величина Δfcж
210
определяется, в основном, шириной спектра флуктуации доплеровских частот ΔFд.фл[1], а также нестабильностями гетеродинных частот и частоты настройки резонансного тракта приемника
|
|
(3.58)
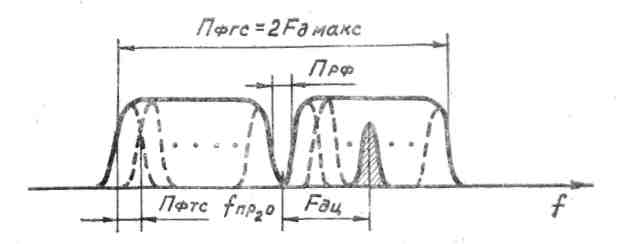
Рис. 3.47
и может достигать на практике нескольких десятков Гц. Такое значение Δfсж требует установки после ФГС узкополосного, как правило, кварцевого фильтра точной селекции (ФТС). Последний технически проще реализовать на более низкой третьей промежуточной частоте, так как
где <Qфтс ~ 103... 104 - добротность нагруженного кварцевого ФТС.
Использование перестраиваемого по частоте «следящего» гетеродина 3 позволяет вместо набора ФТС (рис. 3.47 пунктир), необходимого в приемнике РЛС обнаружения, обойтись лишь одним фильтром.
После режекции проникающих сигналов и фильтрации полезных производится их основное усиление в главном УПЧ (ГУПЧ, рис. 3.46). Чем ближе значение Пфтс к величине Δfсж, тем большее отношение сигнал-шум может быть получено на выходе приемного устройства (3.53). Выходные сигналы приемника поступают на входы следящих систем (СС) по скорости и дальности. Последняя, как правило, реализуется путем низкочастотной модуляции временного положения колебаний обобщенного 2-го гетеродина.
Задача сохранения когерентности принимаемых сигналов в течение всего времени интегрирования τинт ~ 1/Пфтс достигается путем создания высокостабильных по частоте в закону модуляции гетеродинных напряжений. Для уменьшения влияния взаимных нестабильностей зондирующих и гетеродинных колебаний последние, как правило, формируются с помощью возбудителя передатчика в схемах синтезаторов частоты (ч. 1, разд. 7).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
