На рис. 3.39 представлены математическое выражение
и график зависимости энергетических потерь ![]() на выходе цифрового (дискретного) СФ от
нормированного интервала дискретизации
на выходе цифрового (дискретного) СФ от
нормированного интервала дискретизации ![]() для нескольких значений нормированной
частоты сигнала
для нескольких значений нормированной
частоты сигнала ![]() .
Из графика следует, что при фиксированной частоте сигнала отношение сигнал-шум
на выходе цифрового (дискретного) СФ уменьшается с ростом
.
Из графика следует, что при фиксированной частоте сигнала отношение сигнал-шум
на выходе цифрового (дискретного) СФ уменьшается с ростом ![]() . Увеличение частоты (ширины
спектра) сигнала при постоянном
. Увеличение частоты (ширины
спектра) сигнала при постоянном ![]() также ухудшает характеристики
цифрового (дискретного) приема по сравнению с аналоговым
также ухудшает характеристики
цифрового (дискретного) приема по сравнению с аналоговым ![]() .
.
Рассмотренные шумы цифровой фильтрации, а
также потери за счет временной дискретизации определяют результирующее отношение
сигнал/шум ![]() на
выходе ЦСФ
на
выходе ЦСФ
![]()
где ![]() —отношение сигнал/шум на входе АЦП;
—отношение сигнал/шум на входе АЦП;
![]() —коэффициенты энергетических потерь за счет
шумов амплитудного квантования входных сигналов, вычислений, коэффициентов ЦСФ
и временной дискретизации соответственно.
—коэффициенты энергетических потерь за счет
шумов амплитудного квантования входных сигналов, вычислений, коэффициентов ЦСФ
и временной дискретизации соответственно.
Значения ![]() определяются согласно рис. 3.39, а
значения первых трех коэффициентов представим в виде
определяются согласно рис. 3.39, а
значения первых трех коэффициентов представим в виде
|
|
|
|
где
![]()
- дисперсия квадратурной составляющей собственных шумов РПрУ на входе АЦП.
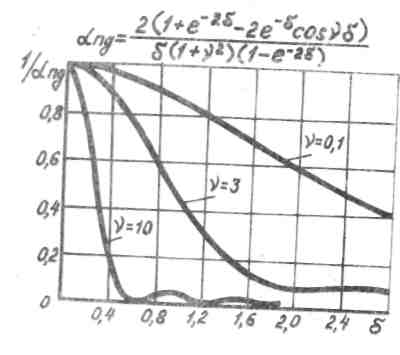
Рис. 3.39
![]() Так как дисперсия «шумов
коэффициентов» пропорциональна
Так как дисперсия «шумов
коэффициентов» пропорциональна ![]() (рис. 3.38), а коэффициент
пропорциональности
(рис. 3.38), а коэффициент
пропорциональности
при![]() равен
равен ![]() • т.е. много меньше п, то
для особенно
• т.е. много меньше п, то
для особенно
важных случаев малого входного сигнала потерями ап.к часто пренебрегают.
3.4. Приемные устройства с корреляционной обработкой сигналов
Областью применения корреляционных и корреляционно-фильтровых приемных
устройств является обработка сложных длинно-импульсных сигналов с большой
базой либо непрерывных сигналов, так как обработка такихсигналов![]() в фильтровых
приемниках встречает известные трудности технической реализации [31,32].
Наряду с простотой технической реализации достоинством корреляционных и
корреляционно-фильтровых РПрУ является их инвариантность к структуре полезного
сигнала, так как при изменении последней достаточно лишь соответственно изменить
вид опорного колебания (рис. 3.40). Главным недостатком
в фильтровых
приемниках встречает известные трудности технической реализации [31,32].
Наряду с простотой технической реализации достоинством корреляционных и
корреляционно-фильтровых РПрУ является их инвариантность к структуре полезного
сигнала, так как при изменении последней достаточно лишь соответственно изменить
вид опорного колебания (рис. 3.40). Главным недостатком
200
таких приемников является зависимость амплитуды их выходного напряжения от совмещения перемножаемых колебаний во времени. Это означает, что использование корреляционных РПрУ в РЛС обнаружения" приводит к многоканальности (по задержке) приемного тракта. Поэтому, как правило, такие приемные устройства применяются в малоканальных по целям РЛС обнаружения - сопровождения, обладающих системами слежения за задержкой принимаемых сигналов.
Как показано на рис. 3.40, корреляционные РПрУ, как и при-
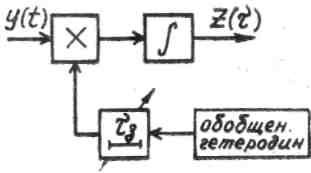
Рис. 3.40
емники с фильтровой обработкой, обеспечивают получение выходного напряжения, пропорционального корреляционному интегралу

(3.51)
Легко показать, что этот интеграл равен интегралу Дюамеля, определяющему
выходное напряжение СФ с импульсной характеристикой, удовлетворяющей равенству![]() . Действительно,
подставляя последнее соотношение в (3.51) и осуществляя замену переменных t+t=a,
получаем
. Действительно,
подставляя последнее соотношение в (3.51) и осуществляя замену переменных t+t=a,
получаем

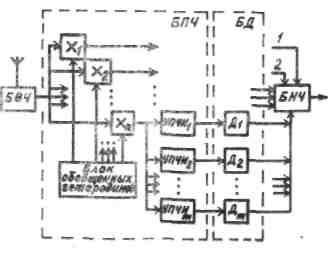
Техническая реализация вычисления (3.51) может быть произведена как с помощью аналоговой, так и цифровой элементной базы. Как показано в подразделе 2.5, аналоговая реализация (3.51) осуществляется в корреляционных детекторах с интегрированием результата перемножения входных и гетеродинных колебаний на постоянном токе (корреляционная обработка) и на радиочастоте (корреляционно-фильтровая обработка). Операция перемножения принимаемых колебаний y(t) и колебаний обобщенного гетеродина при корреляционной обработке (рис. 3.41) производится в балансных (кольцевых) фазовых детекторах (ФД), а накопление
сжатого по спектру сигнала—в RС-фильтрах низкой частоты. Операции возведения в квадрат и извлечения квадратного корня, не-
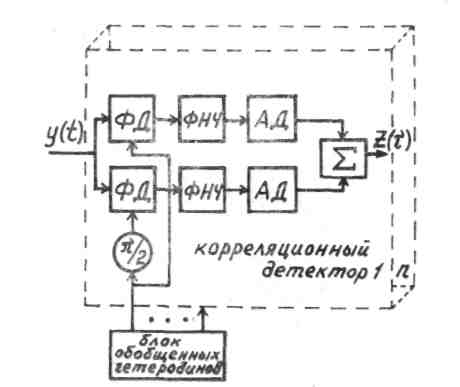
Рис. 3.41
|
|
|
Рис. 3.42 |
Состав и назначение БВЧ, БД и БНЧ те же, что и у
производится перемножение принимаемых сигналов со сдвинуты ми на интервал Дт колебаниями обобщенного гетеродина, повторяющими закон модуляции полезного сигнала (при ∆τ, равном половине интервала корреляции, потери в отношении сигнал-шум составляют примерно 1,3 дБ). Для подавления гармоник гетеродинных колебаний на выходе смесителей последние, как правило, выполняются по балансной схеме (ИМС 174ПС1, 526ПС1 и др.). Наличие в каждом канале дальности нескольких УПЧ, которые содержат в своей нагрузке узкополосные фильтры-интеграторы (УПЧИ), настроенные на разностную частоту сигнальных и гетеродинных колебаний, обусловлено отсутствием в общем случае информации о скорости цели. Частотную расстройку соседних УПЧИ и их полосу пропускания Пинт обычно выбирают равными ширине спектра сжатого сигнала
|
|
(3.52)
где Тс.э — длительность входного сигнала либо эквивалентная длительность непрерывного сигнала, в течение которой удается осуществить когерентное накопление (подразд. 2.5.4).
При длительностях входных сигналов, составляющих несколько сотен микросекунд... миллисекунды, реализация узкополосных УПЧИ становится возможной лишь на достаточно малой промежуточной частоте. Для этого между перемножителем и УПЧИ должны быть установлены один или несколько понижающих преобразователей частоты (рис. 3.43,а) либо необходимо использование фазового детектирования (рис. 3.43,6). С другой сотороны, столь
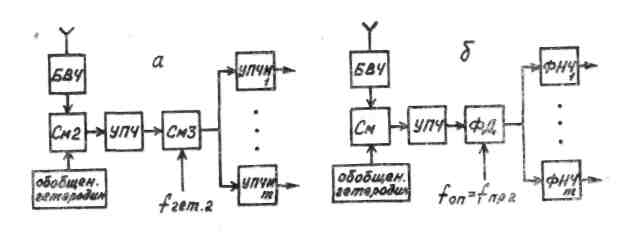
Рис. 3.43
малые значения Пинт (десятки...сотни Гц) требуют очень большого количества интеграторов, равного отношению 2Fдоn макс/Пинт в каждом канале дальности. Для снижения этого количества часто производится последовательно-параллельный поиск по скорости путем ступенчатого изменения частоты гетеродина одного из по-
203
нижающих преобразователей частоты (рис. 3.43,а) на величину,
Как правило, интегрирующие фильтры в диапазоне промежуточных частот выполняют с использованием кварцевых резонаторов, а для частот менее 100 кГц - электромеханических резонаторов либо активных RС-фильтров [8].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.