где R— вектор весовых коэффициентов;
ф-1 — обратная корреляционная матрица помеховых колебаний, принятых парциальными антеннами;
S — вектор, характеризующий амплитудно-фазовое распределение 'ожидаемого сигнала на раскрыве антенной системы;
а — скалярный множитель, зависящий от выбранного критерия эффективности.
Вектор весовых коэффициентов может быть оценен непосредственно по выражению (5.7), в которое вместо Ф"1 необходимо
подставить ее оценку Ф-1, либо при помощи других алгоритмов
оценки вектора весовых коэффициентов R. Выбор алгоритма управления непосредственно влияет на сложность технической реализации адаптивной системы и на скорость переходных процессов в ней.
Все методы вычисления вектора весовых коэфициентов можно разделить на две группы: 1) с обратными связями и 2) прямые. В историческом аспекте первые многоканальные адаптивные системы реализовывались на основе алгоритмов с обратными связями в аналоговом виде. Способов технической реализации таких систем известно много. Однако все они могут быть сведены к двум разновидностям:
адаптивные системы без контрольного сигнала;
адаптивные системы с контрольным сигналом.
Эти адаптивные системы могут быть реализованы на базе одноканальных гетеродинных или квадратурных автокомпенсаторов помех.
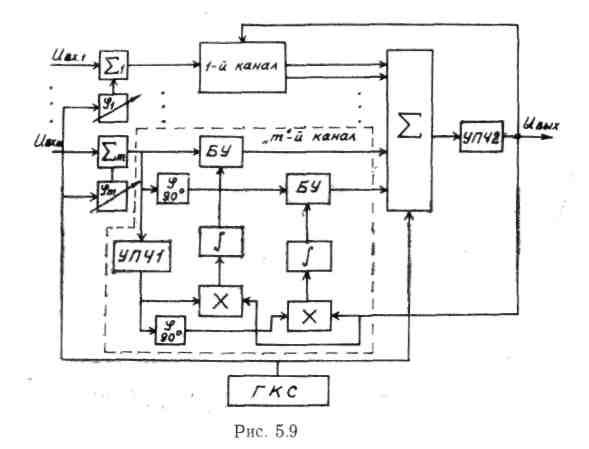
Структурная схема адаптивной системы с обратной связью без контрольного сигнала, реализованная на промежуточной частоте на базе квадратурных автокомпенсаторов помех (АКП), представлена на рис. 5.8. Па вход системы подаются колебания с выходов многоканального УПЧ. Эти колебания подаются на весовые комплексные регуляторы, состоящие из фазовращателя на 90° и двух дифференциальных балансных усилителей (БУ), и на устройство вычисления комплексных весовых коэффициентов. Устройство вычисления весовых коэффициентов каждого канала включает: фазовращатель на 90°, два перемножителя и интегратора (фазовые детекторы), два сумматора, на один из выходов которых подаются постоянные напряжения, пропорциональные синфазной (Sc) и квадратурной (SL) составляющей вектора ожидаемого сигнала. Выходные напряжения сумматора являются управляющими для весового регулятора. Покажем, что схема, представленная на рис. 5.8, действительно формирует управляющее напряжение ri,пропорциональное весовым коэффициентам оптимального пространственного фильтра. Для удобства анализ схемы будем производить в комплексной форме.
Для интегрирующей RC цепи известно, что ее выходное напряжение ут связано с входным хт дифференциальным уравнением
Туm+Уm = хт, (5.8)
где Т — постоянная времени интегрирующей цепи.
«•» — означает производную по времени. Учтем, что
xa = K1KgUвхmUвых, (5.9)
где K1Kg—коэффициент усиления УПЧ1 и фазового детектора, а выходное напряжение адаптивной системы равно

где Кг — коэффициент усиления УПЧ2;
*— знак комплексного сопровождения. Подставим (5.10) в (5.9)
![]()
Полученное соотношение подставим в (5.8) и получим дифференциальное
уравнение, описывающее функционирование адаптивной системы
где
Если предположить, что помеховая обстановка за время переходных
процессов в системе не изменяется, то после усреднения по реализациям получим
из (5.12) следующее матричное уравнение:
Стационарное решение этого уравнения можно получить с учетом того, что R=S—Y![]()
Если диагональные элементы матрицы Кт.Ф много больше единицы, то что с точностью до постоянного
множителя
что с точностью до постоянного
множителя
![]() соответствует
оптимальному вектору весовых коэффициентов (5.7).
соответствует
оптимальному вектору весовых коэффициентов (5.7).
Аналоговая реализация рассмотренного адаптивного пространственного фильтра вызывает определенные трудности, связанные с точностью формирования вектора напряжений S, осуществляющего управление главным лепесткам диаграммы направленности (ДН) адаптивной антенны. Поэтому при аналоговой реализации многоканального адаптивного пространственного фильтра с равноценными каналами наиболее целесообразно осуществлять управление главным лепестком ДН антенны либо с помощью набора фазовращателей, устанавливаемых на входе пространственного фильтра, либо с помощью контрольных сигналов.
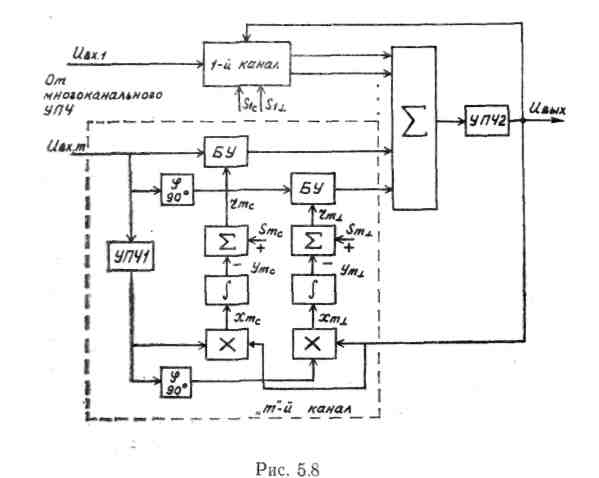
Существует два основных способа реализации адаптивных устройств с использованием контрольных сигналов. Если известно угловое направление на источник полезного сигнала, то чаще всего создается вектор контрольных радиосигналов, подаваемых на соответствующие входы многоканальной адаптивной приемной системы и на дополнительный вход сумматора (рис. 5.9).
Ожидаемое фазовое распределение сигнала по апертуре антенной решетки задается с помощью управляемых фазовращателей Ть-чфт- В этом случае амплитуды и фазы контрольных сигналов можно представить в виде вектора У PKz S, где Ркс —средняя мощность контрольного сигнала, представляющего собой чаще
всего непрерывные немодулированные колебания, с частотой, которая может быть легко отфильтрована на выходе пространст-
|
|
венного фильтра. Можно доказать, что стационарное решение для вектора весовых коэффициентов имеет вид [3]
|
|
Для мощных контрольных сигналов (Ркс-*00) это выражение принимает вид
Следует иметь в виду, что различные коэффициенты а,-, где г'=1,2...,
характеризуют определенные ограничения, задаваемые на выходные колебания
пространственного фильтра и чаще всего не оказывают влияния на выходное
отношение мощности полезного сигнала к мощности шума. Так, например,характеризует
ограничение вида R*SS*R=const, т.![]() е. независимо от количества,
мощности и пространственного расположения источников шума коэффициент
передачи многоканального приемника
е. независимо от количества,
мощности и пространственного расположения источников шума коэффициент
передачи многоканального приемника
276
будет поддерживаться таким, что при воздействии полезного сигнала с ожидаемого направления его интенсивность на выходе системы будет неизменной.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.