Отклонение сдвига фазы в фазовращателе от 90 приводит к появлению ложных сигналов на выходе фазовых детекторов [II]. Пусть напряжение с выхода УПЧ является гармоническим:
![]()
Причем ![]() , а сдвиг частоты Ω может быть
вызван нестабильностями частоты передающего устройства, гетеродина приемного
устройства, наличием доплеровского сдвига частоты в принятом сигнале или просто
является одной из спектральных составляющих сложного зондирующего сигнала,
которая подвергается анализу. Если сдвиг фазы в фазовращателе равен
, а сдвиг частоты Ω может быть
вызван нестабильностями частоты передающего устройства, гетеродина приемного
устройства, наличием доплеровского сдвига частоты в принятом сигнале или просто
является одной из спектральных составляющих сложного зондирующего сигнала,
которая подвергается анализу. Если сдвиг фазы в фазовращателе равен ![]() , то комплексный сигнал
на выходах ФД можно записать в виде
, то комплексный сигнал
на выходах ФД можно записать в виде
![]()
Используя формулы Эйлера, получим
Учитывая, что ![]() ,
выражение для комплексного сигнала можно записать в виде
,
выражение для комплексного сигнала можно записать в виде
Из полученного выражения
видно, что ошибка в сдвиге фазы приводит к появлению ложного сигнала на частоте
— Ω
(второе слагаемое выражения (2.14)). Для обеспечения уровня ложного сигнала не
более —40 дБ ошибка в сдвиге фазы ![]() .
.
Искажения, вызванные ![]() , могут быть скомпенсированы умножением квадратурной
составляющей на фазовый множитель
, могут быть скомпенсированы умножением квадратурной
составляющей на фазовый множитель ![]() .
.
При этом получаем
Таким образом, выходной
сигнал фазовых детекторов отличается от комплексной огибающей сигнала на
выходе УПЧ тем, что он сдвинут по фазе на ![]() и амплитуда его уменьшилась в
и амплитуда его уменьшилась в ![]() раз. Такие
искажения сигнала в большинстве случаев при
раз. Такие
искажения сигнала в большинстве случаев при ![]() <10° не сказываются на окончательный
результат обработки сигнала.
<10° не сказываются на окончательный
результат обработки сигнала.
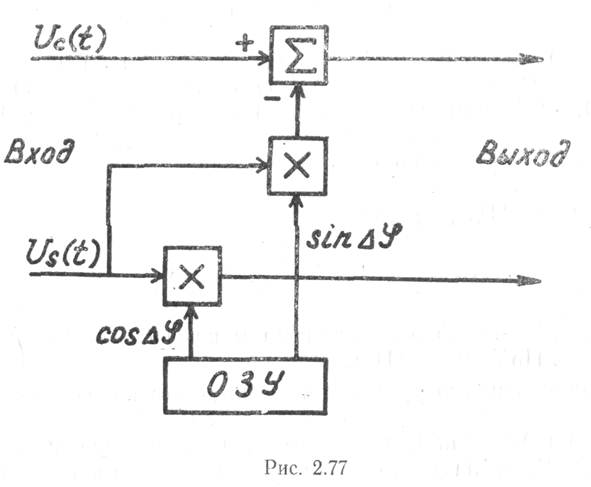
Алгоритм работы устройства, реализующего умножение квадратурной составляющей сигнала на eJAφ, представлен на рис. 2.77 Он основан на том, что
![]()
Значения sin![]() и
и ![]() , если
имеется возможность, предварительно могут быть оценены и записаны в ОЗУ.
Коррекцию составляющих комплексного сигнала целесообразно реализовать после
АЦП в устройстве цифровой обработки сигналов.
, если
имеется возможность, предварительно могут быть оценены и записаны в ОЗУ.
Коррекцию составляющих комплексного сигнала целесообразно реализовать после
АЦП в устройстве цифровой обработки сигналов.
2.6.6. Определение места включения преобразователе
Если ![]() , то, как показано в 2.6.3, АЦП можно считать линейным четырехполюсником.
Любой линейный четырехполюсник можно охарактеризовать коэффициентом шума-
Коэффициент шума АЦП можно получить из известного выражения [2]
, то, как показано в 2.6.3, АЦП можно считать линейным четырехполюсником.
Любой линейный четырехполюсник можно охарактеризовать коэффициентом шума-
Коэффициент шума АЦП можно получить из известного выражения [2]

где Ршч — номинальная мощность собственных шумов четырехполюсника;
Ршго.— номинальная мощность тепловых шумов, создаваемая внутренним сопротивлением источника сигнале;
Кр — коэффициент передачи четырехполюсника по мощности.
Учтем, что для представления аналогового сигнала в цифровом виде предварительно производится преобразование исходного сигнала в ряде фиксированных значений, а затем уже их кодирование. Для кодирующего устройства (рис. 2.68) можно полагать Кр=1.
Тогда

где ![]() — входное сопротивление АЦП.
— входное сопротивление АЦП.
Номинальная мощность тепловых шумов Ршго равна [2]
![]()
Тогда

Величина ![]() значительно больше единицы.
Так, для микросхемы 1107 ПВ2, у которой
значительно больше единицы.
Так, для микросхемы 1107 ПВ2, у которой ![]() =7,8 мВ и RBХ =75 Ом, имеем
=7,8 мВ и RBХ =75 Ом, имеем ![]() , при
, при ![]() = 1 МГц. Поэтому
установка АЦП не посредственно после блока высокой частоты РПрУ может привести
к резкому ухудшению предельной чувствительности приемного устройства вследствие
увеличения коэффициента шума приемного устройства с АЦП, равного
= 1 МГц. Поэтому
установка АЦП не посредственно после блока высокой частоты РПрУ может привести
к резкому ухудшению предельной чувствительности приемного устройства вследствие
увеличения коэффициента шума приемного устройства с АЦП, равного

где ![]() ,
, ![]() — коэффициент шума и коэффициент
передачи по мощности РПрУ без АЦП.
— коэффициент шума и коэффициент
передачи по мощности РПрУ без АЦП.
Для определения требуемого
коэффициента передачи приемного устройства необходимо задавать допустимое
ухудшение коэффициента шума ![]() или допустимое ухудшение предельной
чувствительности
или допустимое ухудшение предельной
чувствительности ![]() за
счет преобразования сигналов в цифровую форму
за
счет преобразования сигналов в цифровую форму
Если задано ![]() , то из (2.18)
требуемый коэффициент передачи приемного устройства
, то из (2.18)
требуемый коэффициент передачи приемного устройства

то есть, если допускается ухудшение коэффициента шума на единицу, то
![]()
Когда задана ![]() , то при
обработке простых сигналов она определяется выражением
, то при
обработке простых сигналов она определяется выражением

Отсюда требуемый коэффициент передачи РПрУ находится из соотношения
Если допускается ухудшение
предельной чувствительности в 2 раза (потери 3 дБ), то ![]() , а
, а

Аналогичный результат
имеет место и в случае, когда допускается ухудшение Кш в два
раза, т.е. ![]() = Ктп
(см. выражение (2.19)).
= Ктп
(см. выражение (2.19)).
Таким образом, для обеспечения требуемой чувствительности , РПрУ необходимо до АЦП осуществлять значительное усиление ( принятых сигналов- Величина этого усиления по мощности должна быть больше значения коэффициента шума АЦП.
2.6.7. Требования к динамическому диапазону АЦП и пути его достижения
Динамический диапазон АЦП
определяется из амплитудной характеристики АК как отношение уровня максимально
допустимого сигнала к минимальному. Максимально допустимый уровень сигнала
определяется уровнем ограничения АЦП, а минимальный— шагом квантования ![]() , т.е. из рис. 2.78.
, т.е. из рис. 2.78.
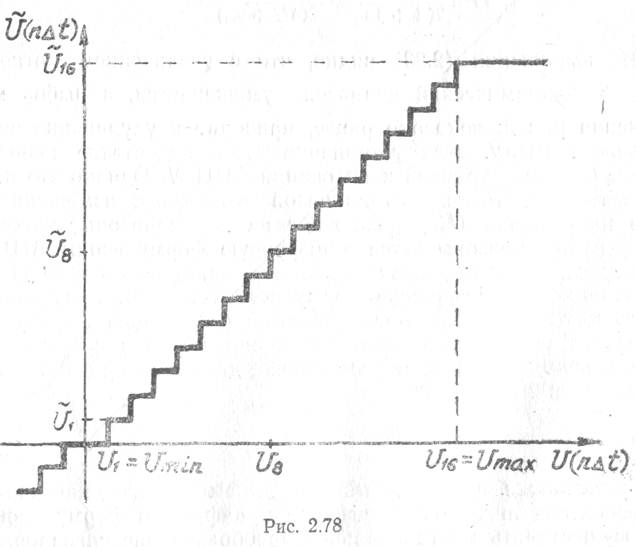

Учтем, что

Деление на два возникает потому, что в число разрядов АЦП входит знаковый разряд. Подставив последние соотношения в (2.21), получаем
![]()
Таким образом, динамический диапазон АЦП равен половине его уровней квантования.
Однако на практике
динамический диапазон АЦП оказывается меньше. Это связано с тем, что для
обеспечения требуемой чувствительности выбирают такое усиление РПрУ, чтобы
среднее квадратическое значение внутренних шумов было в 1..-4 раза больше шага
квантования, т.е. ![]() .
С учетом внутренних шумов РПрУ динамический диапазон АЦП определяется по
формуле
.
С учетом внутренних шумов РПрУ динамический диапазон АЦП определяется по
формуле

Из выражения (2.23)
видно, что с увеличением отношения ![]() динамический
диапазон уменьшается, а выбор малого значения
динамический
диапазон уменьшается, а выбор малого значения ![]() , как показано ранее, приводит к ухудшению
чувствительности РПрУ. Для устранения этого недостатка необходимо повышать
число уровней квантования АЦП N. Однако это не всегда возможно. Тогда
весь диапазон возможных изменений входного напряжения U(t) разбивают на поддиапазоны, каждый из которых
преобразовывается в цифровую форму своим АЦП. Например, для знакопеременного
входного сигнала одним АЦП преобразовываются в цифровую форму положительные
значения U(t), а отрицательные
преобразовываются с помощью другого АЦП. Знаковый разряд выходного числа
определяется с помощью отдельного компаратора. В этом случае динамический
диапазон повышается в 2 раза:
, как показано ранее, приводит к ухудшению
чувствительности РПрУ. Для устранения этого недостатка необходимо повышать
число уровней квантования АЦП N. Однако это не всегда возможно. Тогда
весь диапазон возможных изменений входного напряжения U(t) разбивают на поддиапазоны, каждый из которых
преобразовывается в цифровую форму своим АЦП. Например, для знакопеременного
входного сигнала одним АЦП преобразовываются в цифровую форму положительные
значения U(t), а отрицательные
преобразовываются с помощью другого АЦП. Знаковый разряд выходного числа
определяется с помощью отдельного компаратора. В этом случае динамический
диапазон повышается в 2 раза:
Таким образом, для повышения динамического диапазона преобразователя аналоговых сигналов в цифровую форму необходимо осуществлять многоканальное преобразование сигналов, а динамический диапазон будет определяться выражением (2.23), где N есть суммарное число уровней квантования всех АЦП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.