Выражение для предельной чувствительности корреляционно-фильтрового приемного устройства непрерывных 'сигналов отличается от соотношения (3.54) на величину мощности проникающих шумов передающего устройства Рm пер

Мощность Ршпер значительно меньше регулярной составляю щей проникающих сигналов передатчика и определяется, в основом, «фазовыми» шумами его каскадов (ч. 1, разд. 5) в узкой полосе пропускания приемника
где Рпер— мощность регулярной составляющей сигнала передатчика;
Gфл — спектральная плотность «фазовых» флуктуации часто ты передатчика;
F — частотная расстройка между зондирующим сигналом и частотой настройки приемника;
βа— затухание сигналов передатчика за счет пространствен ного разноса и взаимной экранировки передающей и приемной антенн.
Таким образом, можно перечислить основные особенности корреляционных (корреляционно-фильтровых) приемных устройств непрерывных сигналов:
формирование несущих и модулирующих частот передатчика и гетеродинов приемника с помощью общих задающих генераторов;
расширенный динамический диапазон и минимальное усиление приемного тракта до перемножителя;
режекция сигналов с «нулевыми» доплеровскими частотами сразу после перемножителя;
основное усиление полезных сигналов производится после режекции помеховых и фильтрации;
влияние шумов передатчика на чувствительность приемника.
Рассмотрим, как реализуются эти особенности на примере приемного устройства РЛС обнаружения с частотным сканированием.
3.4.2. Структурная схема приемного устройства РЛС с частотным сканированием
Вариант структурной схемы приемного устройства РЛС с непрерывным ЛЧМ сигналом и частотным сканированием приведен на рис. 3.48.
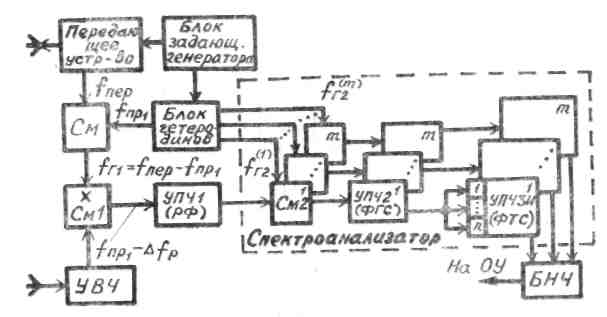
Рис. 3.48
Передающее устройство генерирует непрерывный с периодической ЛЧМ зондирующий сигнал, который излучается передающей антенной. В процессе частотного сканирования, например в азимутальной плоскости, диаграмма направленности антенны перемещается по азимуту с периодом модуляции зондирующего сигнала. Поэтому длительность эхо-сигналов целей, расположенных на определенных азимутах, ограничена временем их облучения
Эхо-сигналы представляют собой длинные ЛЧМ радиоимпульсы, несущая частота которых содержит информацию об азимуте целей, а время запаздывания τ3 относительно момента излучения колебании с данной несущей — информацию о дальности цели. Несущая частота эхо-сигналов от движущихся целей приобретает Дополнительно доплеровский сдвиг частоты Fд
Законы изменения частоты зондирующего сигнала fnep(t) и сигналов, отраженных от целей с различными азимутами и фиксированными дальностью (запаздыванием τ3) и радиальной скоростью (доплеровским сдвигом Fд, fотр{t,τ3,Fд} показаны на рис. 3.49 соответственно сплошной и пунктирными линиями. Отрезками пунктирной и сплошной линий показаны законы изменения частоты внутри импульсов эхо-сигналов соответственно неподвижной (Fд = 0) и движущейся целей с определенными азимутом и дальностью.
Принятые приемной антенной эхо-сигналы после малошумящего усиления в УВЧ поступают на вход первого смесителя, выполняющего функции перемножителя. На другой вход перемно-
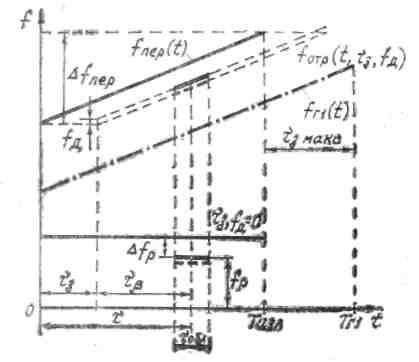
Рис. 3.49
жителя подаются колебания обобщенного гетеродина. Они получаются из колебаний задающего генератора передатчика путем сдвига по частоте на величину первой промежуточной частоты fпр1 Сдвиг осуществляется с помощью вспомогательного смесителя, на который из блока гетеродинных напряжений подаются колебания с частотой сдвига, равной fпр1 . Закон изменения частоты колебаний обобщенного гетеродина fг1 (t) показан на рис. 3.49 штрих-пунктирной линией. С учетом запаздывания эхо-сигналов колебания гетеродина имеют длительность линейного участка изменения частоты Тг1=Тизл+τз.макс.
Таким образом, рассматриваемое приемное устройство является корреляционно-фильтровым, так как основной операцией обработки является частотная демодуляция без изменения длительности (сжатие по спектру) эхо-сигналов. Его несущественной особенностью по сравнению с ранее рассмотренным (рис. 3.46) является сжатие сигналов по спектру уже при первом преобразовании частоты.
Демодулированные радиоимпульсные эхо-сигналы на выходе перемножителя имеют разностную частоту заполнения, которая является постоянной в течение импульса и зависит от дальности и радиальной скорости целей (параметров τ3 и Fд сигналов)
![]()
где Δfр(τз, Fa)= vfτ3±Fд— величина отклонения разностной частоты fр от fnpi;
vf скорость изменения частоты зондирующего, отраженных и гетеродинирующего сигналов.
Информация о дальности, заключенная ранее в запаздывании эхо-сигналов τз., после преобразования на разностную частоту, содержится также в частоте заполнения демодулированных радиоимпульсов. Изменение частоты заполнения, пропорциональное дальности, складывается с доплербвским сдвигом частоты. По отклонению Δfр(τз, Fa) при использовании одного из способов устранения неопределенности дальность—скорость, присущей ЛЧМ сигналам, можно измерить раздельно τз и Fди определить дальность и радиальную скорость целей. Не останавливаясь на способах совместного измерения τз и Fд, будем полагать, что производится компенсация доплеровского сдвига Fд или его величина пренебрежимо мала. Тогда изменение частоты заполнения можно считать обусловленным только запаздыванием эхо-сигналов:
![]()
Эхо-сигналы целей с определенными азимутом и дальностью характеризуются полным запаздыванием (относительно начала периода зондирования) τ = τβ+τз эквивалентной длительностью τсэ=τобл и отклонением частоты Δfр (рис. 3.49). Измерение отклонения Δfр при условии Fд =0 эквивалентно измерению параметра τз или дальности до цели. Измерение полного времени запаздывания т при известном τз эквивалентно измерению величины τβ = τ - τз или азимута цели β
Очевидно, что полоса пропускания тракта до перемножителя должна быть не меньше полной девиации частоты передатчика, Δfпер, сложенной с удвоенной величиной максимального доплеровского смещения частоты:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.