а2=аь или (Рсш+РгшКР)1$—Рсш, где КР— коэффициент усиления] приемного устройства по мощности. Так как мощность шумов ГШ на выходе РПрУ значительно больше мощности его собственных шумов, то первым слагаемым в скобках можно пренебречь. Тогда из последнего выражения следует: Рсш^РгщКр/ф.
Подставляя последнее соотношение в формулу для коэффициента шума (6.3), получаем:

Так как мощность генератора шума строго постоянна, то по величине затухания р можно однозначно определить Кш. Практически шкала аттенюатора может быть проградуирована непосредственно в значениях коэффициента шума.
В промышленных измерителях коэффициента шума широко применяется модуляционный метод измерения коэффициента шума. Для пояснения данного метода воспользуемся известным выражением для коэффициента шума

Из последнего выражения следует, что при фиксированном коэффициенте усиления приемного устройства по мощности КР его коэффициент шума -будет пропорционален мощности шума на выходе приемника. Поэтому первым этапом измерения является установка заданного значения коэффициента КР —(режим «калибровка» (рис. 6.3). В этом режиме генератор шума подключается ко входу приемника и с помощью ручной регулировки усиления на его выходе устанавливается заданное значение выходной мощности (С), значительно превышающей мощность собственных шумов (Рсш) приемного устройства
![]()
|
|
|
Так как мощность генератора шума (Ргш) также постоянная, го >в результате такой калибровки будет установлен заданный ко- |
В режиме «измерение» ГШ выключается. При этом показания измерительного прибора на выходе приемного устройства Ршвых в соответствии с выражением (6.4) будут (пропорциональны коэффициенту шума. В измерителях коэффициента шума шкала прибора градуируется непосредственно в значениях коэффициента шума.
V Существует ряд методов автоматического измерения коэффициента шума. Типовая схема автоматического модуляционного измерителя коэффициента шума представлена на рис. 6.4. Прин-
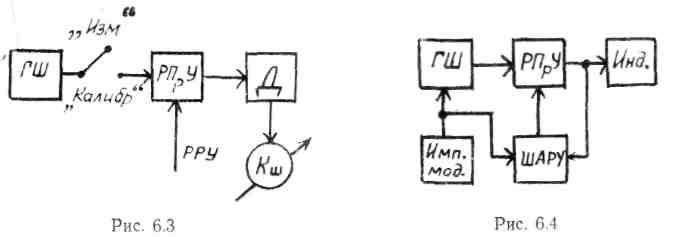
цип действия схемы основан на применении вместо ручной регулировки усиления приемного устройства шумовой АРУ, а также автоматического включения и выключения генератора шума с помощью импульсного модулятора. Это позволяет исключить ручное переключение режимов работы «калибровка» — «измерение» (рис. 6.3), так как установка заданного коэффициента передачи приемного тракта производится автоматически с помощью системы ШАРУ
где Ршвых — мощность шумов генератора шума на выходе приемного' устройства, стабилизированная системой ШАРУ.
Эпюры, поясняющие работу автоматического измерителя, представлены на рис. 6.5. Напряжение регулирования (Uper), вырабатываемое системой ШАРУ по шумам
генератора шума (U-ш)> сохраняется
неизменным в течение всего периода повторения модулирующих импульсов.
Технически это реализуется в аналоговых системах ШАРУ применением пиковых
детекторов со сбросом, а в цифровых ШАРУ — путем размыкания входа
счетчика-интегратора ШАРУ в момент
окончания модулирующего импульса. По переднему
фронту модулирующего импульса происходит разряд емкости пикового детектора (либо запись в счетчике начального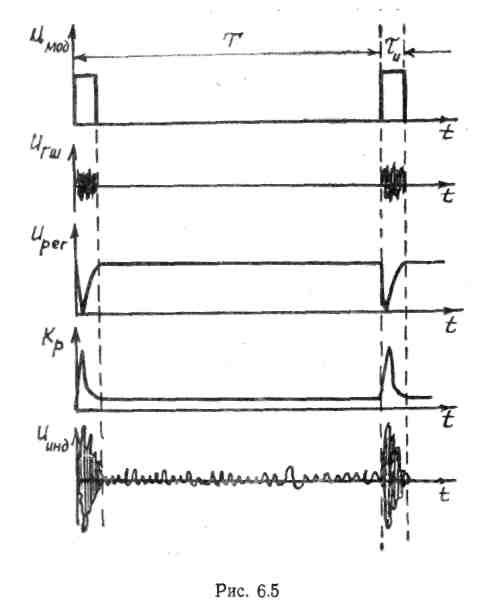
кода) и вновь повторяется процесс установления Uрег. Ограниченное 'быстродействие индикатора (тИНд>ти) обеспечивает индикацию лишь собственных шумов приемника в течение основной части периода повторения (Т—ти), когда генератор шума выключен. В работе [1] описан подобный измеритель, имеющий ти~ ~ЛО0мкс, 7~100мс, точность измерения коэффициента шума не хуже 0,5дБ.
Еще более высокая точность измерения Кш может быть получена в автоматическом модуляционном измерителе, представленном на рис. 6.6. Измеритель включает в себя два измерительных канала (верхний — суммарный, нижний—опорный) с равными коэффициентами передачи. Это равенство обеспечивается с помощью режима «калибровка», когда на входы обоих каналов (ключи Кл открыты) поступают непрерывные шумовые колебания генератора ГШ и с помощью регулируемого аттенюатора АТТ в суммарном канале добиваются нулевого сигнала на выходе сумматора 21 (на нижнем входе сумматора *2 установлен инвертор).
В режиме «измерение» шумы ГШ (Рги1~пкТ0Пш) подвергаются с помощью импульсного модулятора ИМ 100-процентной амплитудной модуляции меандром с частотой F несколько десятков Гц и синхронно с ними переключается
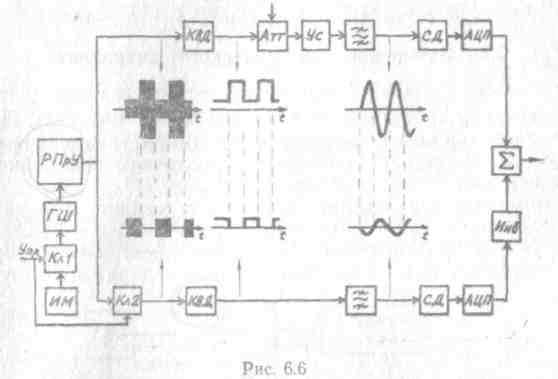
ключ Кл2 в опорном канале (при этом включение ГШ сопровождается размыканием ключа Кл2). Это означает, что на вход суммарного канала поступают либо только собственные шумы РПрУ, либо их смесь с шумами ГШ, а на входе опорного канала периодически присутствуют лишь собственные шумы РПрУ. Напряжения на выходах квадратичных детекторов обоих каналов будут пропорциональны мощности их входных сигналов, полосовые фильтры iB каналах настроены на частоту F. Поэтому постоянная составляющая выходного напряжения квадратичного детектора суммарного канала, пропорциональная мощности собственных шумов РПрУ, на выходе полосового фильтра подавляется. Тогда на выходе синхронного детектора (СД) суммарного канала получаем напряжение, пропорциональное только мощности внешнего шума ГШ, усиленного приемником в Кр раз (^сд \=о.РтшКр, где а —коэффициент пропорциональности). Применение балансного синхронного детектора обусловлено тем, что в отличие от амплитудного детектора его выходное напряжение на «нулевых» частотах не содержит составляющую, вызванную фликкер-эффектом полупроводникового диода детектора. Так как ключ на входе опорного/канала переключается в противофазе с коммутацией ГШ, то выходное напряжение синхронного детектора опорного канала будет пропорционально мощности собственных шумов РПрУ
(^СД2 =аРСш).
Сравнение выходных напряжений обоих каналов производится путем их преобразования в двоичный код с помощью АЦП с логарифмической амплитудной характеристикой и последующим сум-
297
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.