Системы измерения угловых координат могут строиться либо но одноканальной, либо по многоканальной схеме. В одноканальных системах используется информация об угловых координатах цели в виде амплитудной модуляции принимаемых сигналов при пространственном сканировании приемной антенны. Известно, что потенциальная точность измерения угловой координаты определяется среднеквадратической ошибкой ofl в виде следующей зависимости;
где бд~ ширина диаграммы направленности приемной антенны по мощности.
Последнее соотношение показывает, что главной задачей приемника в канале измерения угловых координат является обеспечение максимально возможного отношения сигнал/помеха. Поэтому приемное устройство этого канала содержит все элементы оптимального обнаружителя с включением после детектора аппаратуры для определения момента пересечения максимума диаграммы направленности антенны направления на цель.
Поскольку такой способ требует приема последовательности отраженных сигналов, то он является чувствительным к флюктуациям амплитуды принимаемых сигналов, порождаемых случайными изменениями эффективной площади рассеяния пели. В этом — один из наиболее существенных недостатков одноканальных методов пеленгации, использующих коническое и линейное сканирование луча или последовательное переключение диаграммы направленности.
В последнее время широкое распространение получил моноимпульсный метод пеленгации, при котором один отраженный сигнал (импульс) дает полную информацию об угловом положении цели. Техническим средством реализации моноимигульоной пеленгации может служить многоканальный прием. Поэтому принцип моноимпульсной пеленгации заключается в приеме отраженных от пели сигналов одновременно по нескольким независимым приемным каналам с последующим сравнением их параметров.
В зависимости от характера извлечения угловой информации о цели из принимаемых сигналов различают два основных метода моноимпульсной пеленгации: амплитудный и Фазовый.
В моноимпульсных системах с амплитудной пеленгацией для определения угловой координаты в одной плоскости формируются две перекрещивающиеся диаграммы направленности, разнесенные на угол 0о от равносигнального направления (рис. 5.3).
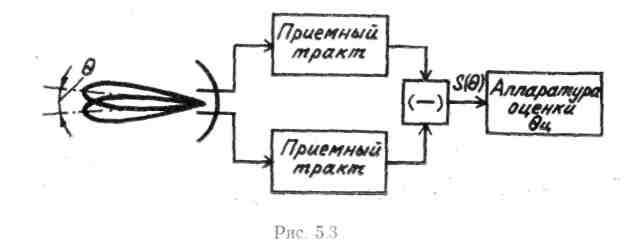
При отклонении цели на угол 6 от равносигнального направления разность амплитуд принятых сигналов в каналах 1 и 2 указывает на величину отклонения цели от равносигнального направления.
В моноимпульсных системах с фазовой пеленгацией направление <на цель в одной координатной плоскости определяется сравнением фаз сигналов, принятых двумя антеннами.
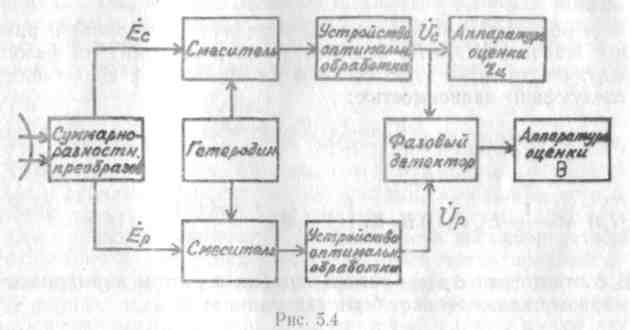
Недостатком схемы (рис. 5.3) является существенное влияние неидентичности каналов на ошибку углового измерения. Для снижения такого влияния используется моноимпульсная система с суммарно-разностным угловым дискриминатором. В таких системах принятые от цели сигналы с выхода антенны поступают в суммарно-разностный преобразователь, где суммируются и вычи таются. С выходов суммарный и разностный высокочастотные сигналы поступают в суммарный и разностный приемные каналы. Амплитуда разностного сигнала определяет величину угловой ошибки, а разность фаз между суммарным и разностным сигналом — знак угловой ошибки (рис. 5 А
Представляет интерес оценить влияние неидентичности амплитудно-фазовых характеристик приемных каналов амплитудной суммарно-разностной моноимпульсной системы на точность пеленгования.
Для упрощения анализа рассмотрим случай пеленгации для режима непрерывного излучения.
Пусть коэффициенты передачи высокочастотных приемных трактов до суммарно-разностного преобразователя соответственно равны К1 и K2, а неидентичность по фазе выражается величиной ср. Тогда суммарный и разностный сигналы на выходе суммарно-разностного преобразователя можно представить следующими выражениями:
|
|
где Ei(t,0), E-2(t,0) — математическое выражение сигналов, принимаемых первым и вторым высокочастотными приемными каналами;
u -- крутизна
рабочего участка диаграммы направленности антенны;
-- крутизна
рабочего участка диаграммы направленности антенны;
F(0о) — коэффициент усиления антенны в равносигнальном направлении.
Если обозначить коэффициенты передачи суммарного и разностного каналов Кс и Кр соответственно и величину их фазовой неидентичности через у, то сигналы на их выходах представляют-ся следующей зависимостью:
|
|
|
(1|+u0)e -f g(l — р)е |
г
В соответствии с этим сигнал ошибки с учетом нормировки по суммарному каналу может быть записан в виде
|
|
C/fh-ft' U^+^'-g3 (1-^)'] cos7-*g(l-n'6') sin ? sinT}/Cp (54)
При идентичных характеристиках приемных каналов (cp = 0, y=0, Kc~Kp, g—l) выражение (5.4) превращается в известное соотношение, соответствующее случаю пеленгации без аппаратурных ошибок
![]()
Сравнение выражений (5.4) и (5.5) показывает, что неидентичность характеристик приемных каналов сказывается на ошибках пеленгации.
Дифференцируя выражения (5.4) по 0, можно найти значение крутизны пеленгационной характеристики в рабочей точке

Для понимания характера зависимости ошибок пеленгации от неидентичности приемных каналов будет рассмотрен ряд частных случаев.
Анализ соотношения (5.4) свидетельствует, что наиболее существенное влияние на пеленгационную характеристику оказывает высокочастотный тракт приемника до суммарно-разностного преобразователя включительно. Неидентичность коэффициентов передачи каналов на этом участке приводит к сдвигу равносигнально-го направления и вызывает ошибку пеленгации (AS), равную
Поэтому в приемном устройстве стремятся расположить суммарно-разностный преобразователь возможно ближе ко входу приемника так, чтобы идентичность каналов зависела в основном от параметров пассивных элементов трактов. Неидентичность фазовых характеристик этих участков приемника приводит к изменению крутизны пеленгационной характеристики иа величину
Интересно отметить, что при ф = л суммарный и разностный каналы функционально меняются местами, вследствие чего работоспособность пеленгационной системы полностью нарушается.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.