|
|
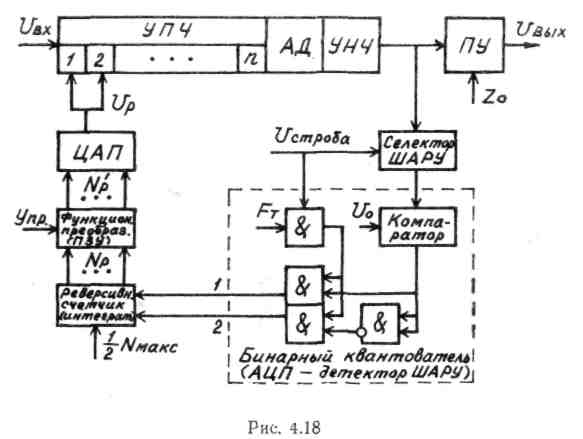
ющихся тактовой частотой. Порог компаратора U0 бинарного квантователя обеспечивает при номинальном уровне шумов тракта частоту появления импульсов на выходах 1 и 2, соответствующих положительным и отрицательным значениям выбросов шума относительно Uo, равную 0,5. В этом случае в реверсивный счетчик-интегратор записывается и считывается одинаковое число импульсов и исходное число, записанное в счетчике (1/2Nмакс) остается постоянным. При изменениях уровня шума на входе порогового устройства вырабатывается код Np, позволяющий отслеживать изменения с точностью 1/2m, где т — число разрядов реверсивного счетчика. Цифроаналоговый преобразователь в схеме применяется при аналоговых методах регулирования р тракте. В случае применения дискретных аттенюаторов с электронным управлением (рис. 4.7) цифровой код управления может подаваться с выходного регистра функционального преобразователя на основе ПЗУ. Наличие ПЗУ расширяет возможности и гибкость регулирования, так как позволяет использовать как априорную информацию о помехах так и о статистике помех не только по одной выборке, но и по серии выборок в различных периодах зондирования и даже по межобзорной информации. Постоянный порог Z0 устанавливается в определенной пропорции относительно U0 [4]:
где
F — вероятность /южной тревоги.
тревоги.
Поэтому рассмотренная схема цифровой ШАРУ является основой для стабилизации уровня ложных тревог при стационарных помехах.
4.3.2. Устройства автоматической регулировки порога (АРП)
При нестационарных помехах, когда необходимо высокое быстродействие, используют параметрическое регулирование порога на основе АРУ — «вперед» (рис. 4.2,6).
Для повышения точности регулирования порога в приемном тракте осуществляется сжатие динамического диапазона за счет применения схем ВАРУ, БАРУ, усилителей с ЛАХ или полосовых ограничителей (рис. 4.19).
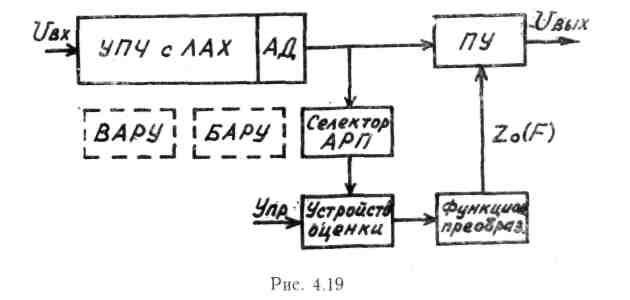
Для релеевокого экспоненциального или нормального распределения для оценки Z0 используют среднее значение шума на временном интервале, полученное при помощи фильтров с конечной импульсной характеристикой.
Один из возможных вариантов построения параметрической
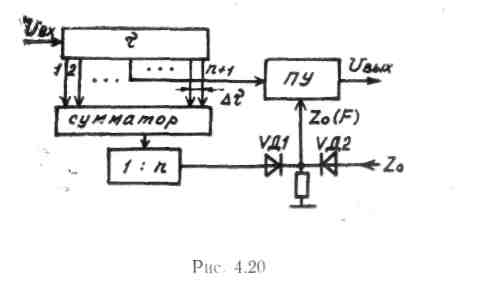
системы АРП изображен на рис. 4.20. При приеме импульсного сигнала длительностью tc на фоне нестационарной шумовой помехи в качестве селектора АРП и фильтра может быть использована n+1 отводная линия задержки с временным запаздыванием между отводами т = tс. Сигнал и шум с центрального отвода линии подаются на пороговое устройство, а с других отводов— усредняются в сумматоре на скользящем временном интервале x=ntc, делятся в п раз и подаются на диодную схему (VД1, VД2) выбора максимума. На второй вход схемы подается напряжение порога, установленного при работе ШАРУ по стационарным шумам (рис. 4.1,в).
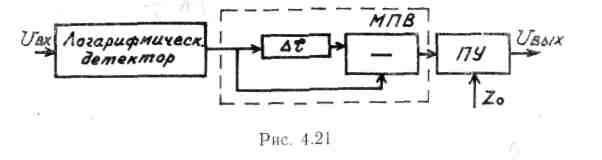
Схема рис. 4.20 эффективно работает, если на интервале усреднения помехи т имеется один эхо-сигнал. Если на селектор АРП действуют два сигнала, разделенные во времени меньше, чем интервал анализа помехи т, то возможен пропуск слабого сигнала. Поэтому при приеме импульсного сигнала на фоне протяженных помех используют селектор на линии задержки при n=1 (два отвода) в комбинации со схемой вычитания схемы малой постоянной времени (МПВ). Вычитание медленно меняющейся по сравнению с сигналом постоянной составляющей протяженной помехи в динамическом диапазоне логарифмического детектора (рис. 4.21) позволяет сохранить постоянный уровень ложных тревог при пороге Z0, стабилизированном системой ШАРУ.
4.3.3. Применение ограничителей в системах стабилизации уровня ложных тревог
В ограничителях со стабильными фазовыми характеристиками информация об уровне эхо-сигналов утрачивается, если уровень ограничений лежит ниже нормального уровня шумов спектр сигнала согласован с полосой пропускания ограничителя.
Различение сигналов и помех осуществляется только но изменению во времени с фазовой структуры сигнала на выходе ограничителя. Это свойство ограничителя обусловило его широкое применение для стабилизации ложных тревог при приеме узкополосных сигналов на фоне интенсивных короткоимпульсных помех [5] (схема широкополосного ограничения — узкополосной фильтрации — ШОУ) или сложных сигналов с угловой модуля цией с базой ftс>20[1]. Такое устройство (рис. 4.22) по аналогии со схемой ШОУ называют схемой ШОС — (широкополосное ограничение — согласованная фильтрация).
В приемниках РЛС с простыми импульсными сигналами полоса пропускания ограничителя должна соответствовать ширине спектра импульсной помехи при Тпом<<tс- Характеристикой,
256
которая Позволяет отличать полезный сигнал от шума или помех от честных предметов, является мгновенная частота, постоянная на протяжении импульса независимо от несущей частоты. Короткие импульсы и эхо-сигнал ограничиваются по амплитуде до уровня ограничения, пиковые мощности помехи и сигнала на выходе оказываются одинаковыми. Узкополосный фильтр селектирует только часть спектра помехи, совпадающую со спектром [сигнала, и выигрыш характеризуется коэффициентом перекрытия спектров.
Методы фазового различия в схеме рис. 4.22 не связаны со скоростью реакции на изменяющуюся интенсивность помех. Они
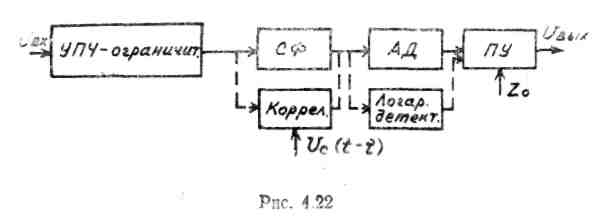
чувствительны только к тому, насколько хорошо эхо-сигнал соответствует заданной внутриимпульсной фазовой структуре. Поэтому схема ШОС используется в приемниках с согласованной фильтрацией и в корреляционных приемниках.
При коэффициентах сжатия Aftc >20 потери полезного сигнала из-за разрушения амплитудной информации в ограничителе нe превышают 1 дБ. Для обеспечения таких потерь необходимо выполнять требования к фазовой стабильности широкополосного ограничителя. Чтобы дополнительные потери были незначительными, крутизна амплитудно-фазового преобразования не должна
превышать 2 - [I].
Применение ограничительного каскада для стабилизации уровня ложных тревог в приемнике сложных сигналов имеет свои недостатки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.