
Если быстродействие элементной базы и чувствительность компараторов АЦП позволяют ограничиться сравнительно небольшим усилением АЧПУ, то в нем может быть использован и приемный тракт прямого усиления. Однако использование супергетеродинного АЧПУ облегчает достижение большего коэффициента усиления, позволяет произвести фильтрацию на частотах, где просто реализуются фильтры на ПАВ, упрощает выполнение дискретизации в АЦП благодаря большей прямоугольное™ АЧХ и оптимальному выбору -промежуточной частоты АЧПУ.
Переход к цифровой фильтрации является наиболее радикальным способом повышения стабильности характеристик приемного устройства. Высокая стабильность характеристик цифровых согласованных фильтров (ЦСФ) и в целом цифровых .приемных устройств связана прежде всего с тем, что на них практически не влияют нестабильности питающих напряжений, изменения климатических условий, дрейфы нуля, старение, вибрации. Как правило, стабильность ЦСФ определяется стабильностью тактовой частоты, что позволяет строить фильтры для сигналов как малой, так и очень большой длительности.
Элементной базой ЦСФ являются цифровые ИМС малой, средней и большой степени интеграции, а также микропроцессорные комплекты. Отсюда следует такое достоинство ЦСФ, как малые габариты, вес, что выступает на первый план при построении многоканальных приемных устройств.
Не менее важным преимуществом ЦСФ является возможность гибкого (программного) управления их параметрами (адаптация), например, при изменении закона модуляции зондирующего сигнала.
К достоинствам ЦСФ следует отнести и сравнительную простоту решения проблемы динамического диапазона путем увеличения разрядности представления сигнала, а также их высокую технологичность, 'в частности, отсутствие операций согласования нагрузок и развязки между каскадами, необходимых при аналоговой реализации СФ.
Рассмотрим вначале способы технической реализации ЦСФ во временной области. К ним относятся рекурсивные и нерекурсивные фильтры, алгоритм работы которых описывается соотношением (3.12). На практике более широкое применение находят нерекурсивные ЦСФ. Это связано с тем, что в радиолокации, как правило, имеют дело с сигналами ограниченной длительности, а также с возможной неустойчивостью рекурсивных фильтров, имеющих тенденцию к накоплению ошибок вычислений.
При квадратурном представлении огибающей принимаемого сигнала алгоритм нерекурсивной фильтрации (первое слагаемое 3.12) сводится к виду
где ![]() —
комплексные огибающие принимаемого сигнала и импульсной характеристики СФ;
—
комплексные огибающие принимаемого сигнала и импульсной характеристики СФ;
![]() —
количество временных выборок принимаемого сигнала.
—
количество временных выборок принимаемого сигнала.
Данный алгоритм может быть реализован как
аппаратурным путем (с помощью спецвычислителя), так и программным
методом с помощью ЭВМ. Однако последний способ на современной элементной базе
позволяет реализовать алгоритм в реальном масштабе времени лишь для
сравнительно узкополосных радиолокационных сигналов. Действительно, только
число Ос операций умножения в секунду, необходимое для получения
одного значения комплексной корреляционной суммы ![]() (3.27) при
интервале временной дискретизации
(3.27) при
интервале временной дискретизации ![]() , будет равно
, будет равно

Даже для значений ![]() =50 мкс Ос составляет
примерно 3 • 109,что превышает возможности существующих ЭВМ.
=50 мкс Ос составляет
примерно 3 • 109,что превышает возможности существующих ЭВМ.
На рис. 3.19 представлена структурная схема ЦСФ в виде спецвычислителя, реализующего данный алгоритм в реальном мае-
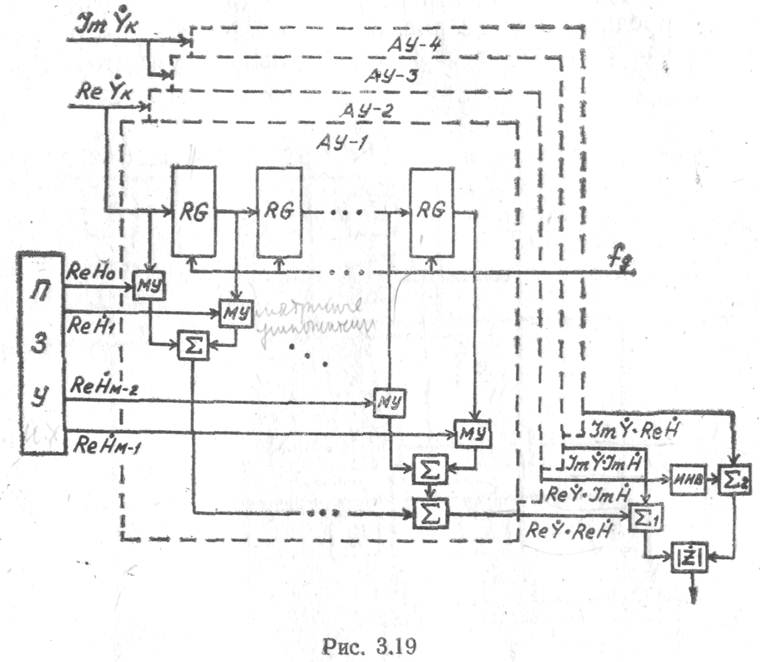
штабе времени, т. е. к моменту выборки текущего
отсчета в фильтре заканчиваются вычисления, связанные с поступлением параллельного
кода предыдущего временного отсчета. ЦСФ состоит из четырех одинаковых
арифметических устройств АУ1...АУ4, в которых .производятся операции
комплексного перемножения временных выборок принимаемого сигнала на значения
импульсной характеристики согласованного фильтра, хранящиеся в ПЗУ, а также
схемы вычисления модуля корреляционной суммы ![]() .
.
Параллельные регистры с числом разрядов,
равным разрядности представления сигнала, играют роль устройств задержки, в которые
информация записывается с АЦП с частотой временной дискретизации ![]() . Иногда в роли
.подобного устройства задержки используют наиболее быстродействующие
биполярные ОЗУ со временем записи и выборки порядка нескольких наносекунд [9].
При обработке широкополосных сигналов, когда цифровая фильтрация в реальном
масштабе времени невозможна, микросхемы ОЗУ обеспечивают согласование скорости
ввода информации со скоростью вычислений.
. Иногда в роли
.подобного устройства задержки используют наиболее быстродействующие
биполярные ОЗУ со временем записи и выборки порядка нескольких наносекунд [9].
При обработке широкополосных сигналов, когда цифровая фильтрация в реальном
масштабе времени невозможна, микросхемы ОЗУ обеспечивают согласование скорости
ввода информации со скоростью вычислений.
Значения импульсной характеристики ЦСФ
хранятся в 1ЦС либо ППЗУ время выборки которых составляет единицы-десятки
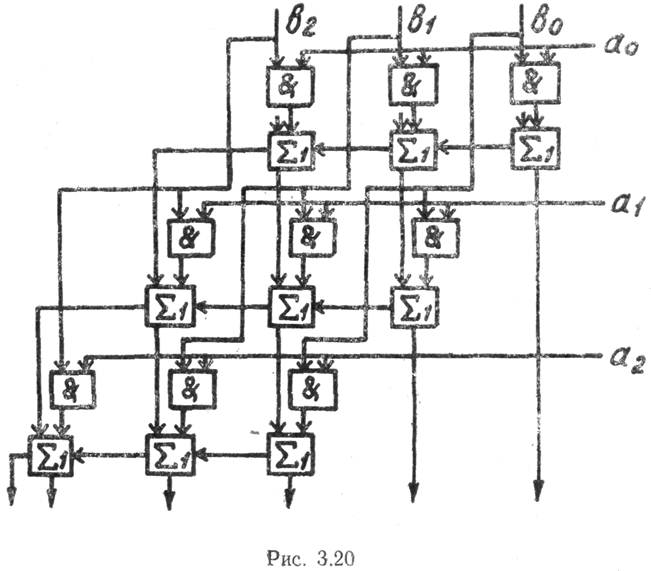
наносекунд. Для повышения быстродействия арифметических блоков применяются
параллельные сумматоры ![]() , как правило, с использованием схем
ускоренного переноса [8] и матричные умножители МУ. Типовая структурная схема
матричного умножителя 3x3 представлена на рис, 3.20, где для каждого разряда
множителя «а» существует свой параллельный сумматор. Время вычисления
произведения определяется только временем задержки сигналов внутри матрицы.
Иногда такие матричные умножители выполняют и виде БИС, например, 1802
ВРЗ...ВР5 (МРУ-16 МУ), последняя из которых выполняет умножение двух
16-разрядных чисел за время 150 нс.
, как правило, с использованием схем
ускоренного переноса [8] и матричные умножители МУ. Типовая структурная схема
матричного умножителя 3x3 представлена на рис, 3.20, где для каждого разряда
множителя «а» существует свой параллельный сумматор. Время вычисления
произведения определяется только временем задержки сигналов внутри матрицы.
Иногда такие матричные умножители выполняют и виде БИС, например, 1802
ВРЗ...ВР5 (МРУ-16 МУ), последняя из которых выполняет умножение двух
16-разрядных чисел за время 150 нс.
Несколько слов о возможных формах представления чисел в ЦСФ: с фиксированной и плавающей запятой. В первом случае числа представляются в виде последовательности положительных (числа, выравненные справа) либо отрицательных (числа, выравненные слева) степеней числа два. Форма представления с плавающей запятой требует формирования двух, последовательностей: мантиссы и порядка. Способ с фиксированной запятой более простой в технической реализации, однако из-за ограниченности разрядной сетки при этом может потребоваться установка перед ЦСФ систем АРУ либо ограничителей (разд. 4). Как правило, в ЦСФ производится нормирование принимаемых сигналов таким образом, чтобы все арифметические операции выполнялись с дробными числами

где L+1 —число двоичных разрядов (разрядная сетка), представляющих сигналы (старший разряд — знаковый, остальные — числовые).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.