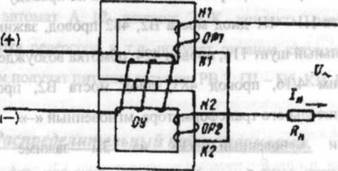
Простейший МУ имеет два сердечника, на которых смонтированы рабочие обмотки ОР1, ОР2 с равным числом витков, соединенные встречно друг другу. Они включены в цепь переменного тока с неизменным напряжением U. Обмотка управления ОУ охватывает оба сердечника и получает питание от источника постоянного тока (тока управления).
Величина переменного тока в рабочей обмотке зависит от общего сопротивления цепи Z, которое включает активное сопротивление цепи R и индуктивное сопротивление обмотки X1
Ток по закону Ома для цепи переменного тока
I= U/Z=√(R2+X2 )
Появление индуктивного сопротивления в обмотке обусловливается электродвижущей силой (э.д.с.) самоиндукции. Эта э.д.с. индуцируется в витках обмотки под действием изменяющегося магнитного потока, вызванного переменным током. Направлена э.д.с. самоиндукции всегда так, чтобы препятствовать изменению тока. Она тем больше, чем больше скорость изменения тока в витках обмоток. Скорость изменения тока зависит от частоты переменного тока.
Обмотки в зависимости от числа витков, геометрических размеров, материала сердечника обладают различными свойствами с точки зрения индицирования э. д. с. самоиндукции. Эти свойства характеризуются индуктивностью L. Индуктивное сопротивление (Ом) подсчитывается по формуле
XL=2πFL
При увеличении тока в обмотках управления МУ увеличивается напряженность магнитного поля (А/м),
H=Iy ωy/ Lc
Jy- ток в обмотке управления, А.
С увеличением напряженности магнитного поля Н возрастает магнитная индукция В до момента магнитного насыщения сердечника, после которого индукция В остается постоянной
После магнитного насыщения сердечника при его дальнейшем намагничивании магнитная проницаемость резко уменьшается и стремится к значению, близкому к единице. Магнитная проницаемость может служить показателем степени намагниченности сердечника. При большом намагничивании ферромагнитный сердечник по способности пропускать магнитный поток приближается к неферромагнитным материалам, и МУ в этом случае фактически неуправляем (это есть режим максимальной
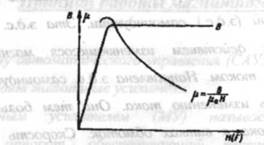
Рис. 15. Зависимость магнитной мндуки.ии В и магнитной проницаемости μ от напряжен ности магнитного поля Н или магнитодви-жущей силы F
Таким образом, при увеличении тока управления IУ увеличивается напряженность магнитного поля Н, уменьшается магнитная проницаемость и абсолютная магнитная проницаемость. Что приводит к уменьшению индуктивности L и индуктивного сопротивления X1 а следовательно, к увеличению рабочего тока (тока выхода) Iр.
Индуктивность L, как известно, не зависит от направления тока управления Iy, поэтому характеристика управления МУ (смотри рисунок внизу) симметрична относительно оси IP
Когда ток управления равен нулю, сердечник МУ не намагничен и его рабочие обмотки имеют большое индуктивное сопротивление. Поэтому рабочий ток будет мал; его называют током холостого хода МУ( Iх).
При увеличении тока управления происходит подмагничивание сердечника, и рабочий ток увеличивается. Средняя часть характеристики, близкая к прямолинейной, является рабочей.
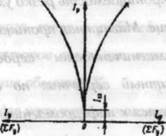
Рис. 16. Характеристика управления про-стейшего магнитного усилителя (беэ обратной связи)
14
Даже небольшое изменение тока управления вызывает резкое изменение рабочего тока
МУ имеет две рабочие обмотки, для того чтобы исключить индуцирование переменой э.д.с. в обмотках управления от рабочего тока. При встречном включении рабочих обмоток с равным числом витков индуцируемые в обмотках управления э. д. с. от каждой из рабочих обмоток будут компенсировать друг друга. Естественно, что каждая из рабочих обмоток должна быть смонтирована на отдельном сердечнике, так как при встречном включении рабочих обмоток с равным числом витков на общем сердечнике результирующая индуктивность МУ равнялась бы нулю.
Магнитный усилитель может иметь несколько обмоток управления, и тогда подмагничивание сердечника будет определяться результирующей магнитодвижущей силой (м.д.с.) этих обмоток.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.