У залежності від профілю копіра 3 золотниковий розподільник створює різницю тисків у порожнинах гідроциліндра визначеної величини і напрямку, забезпечуючи тим самим необхідне переміщення каретки з робочим інструментом відносно оброблюваної деталі 4. По цій же схемі працюють і двухкоординатні копіювальні верстати лише з тією різницею, що подача у них здійснюється одночасно по двох координатах.
Схема простого однокамерного гідроприводу з механічним керуванням і золотниковим гідророзподільником представлена на мал. 2. Такий привід являє собою замкнуту систему із твердим зворотнім зв'язком, що здійснюється за допомогою важеля 1, з'єднаного з циліндричним золотником 2. При переміщенні золотника із нейтрального положення вправо чи вліво, відкриваються прохідні щілини для потоку робочої рідини, витрата якої залежить від площі цих щілин і ходу золотника. Площа прохідних щілин може змінюватися прямо пропорційно ходу золотника чи по будь-якому іншому закону, необхідному для регулювання привода.
Як виконавчий механізм у гідроприводах з механічним керуванням часто використовують гідроциліндр із двостороннім штоком. У випадку переваги однобічного навантаження застосовують силові циліндри з однобічним штоком.
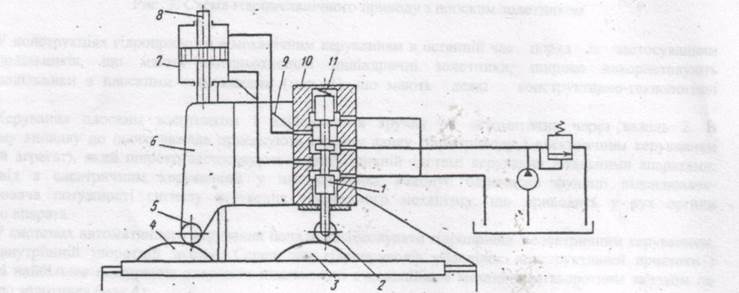 Мал. 1.
Схема приводу копіювально-фрезерного верстата
Мал. 1.
Схема приводу копіювально-фрезерного верстата
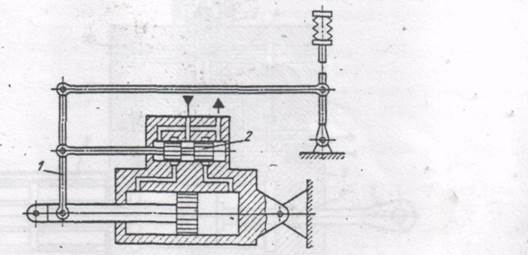
Мал. 2. Схема гідромеханічного приводу з циліндричним золотником
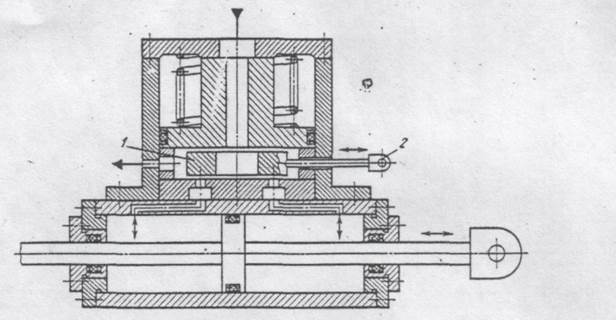
У конструкціях гідроприводів з механічним керуванням в останній час поряд із застосуванням гідророзподільників, що мають чотирьохходові циліндричні золотники, широко використовують гідророзподільники з плоскими золотниками (мал. 3), що мають деякі конструктивно-технологічні переваги.
Керування плоским золотником 1 здійснюється вручну чи автоматично через важіль 2. В останньому випадку до цього важеля приєднують вихідну ланку гідроприводу з електричним керуванням (кермовий агрегат), який широко застосовують в автоматичній системі керування літальними апаратами. Гідропривід з електричним керуванням у цих системах виконує одночасно функції підсилювача-перетворювача потужності сигналу керування виконавчого механізму, що приводить у рух органи літального апарата.
У системах автоматичного керування почали застосовувати гідропривід з електричним керуванням, що має внутрішній зворотній зв'язок. Серед цих гідроприводів унаслідок конструктивної простоти і надійності найбільше поширення одержали підсилювачі з позиційним механічним зворотним зв'язком по положенню золотника (мал.4).
На схемі, що приведена на мал. 4, зворотній зв'язок здійснюється через заслонку 3, кінець якої закінчується сферичною поверхнею 4, що вставляється з мінімальним зазором у кільцевий паз циліндричного золотника 9. Керуючий сигнал надходить на обмотки керування електромеханічного перетворювача 2, викликаючи переміщення заслінки щодо сопел 10. Виникаюча при цьому різниця тиску на торцях золотника 9 приводить до зсуву його з нейтрального положення і відкриттю відповідної прохідної щілини, через яку робоча рідина надходить в одну з порожнин гідроциліндра 5, переміщуючи поршень зі штоком 6. Звичайно один кінець штока за допомогою серги 7 з'єднується з навантаженням, а інший з датчиком зворотного зв'язку 8.
Мал. 3. Схема гідромеханічного приводу з плоским золотником
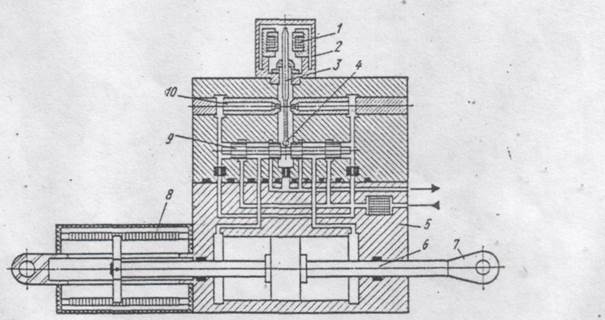
Мал. 4. Схема електрогідравлічного приводу з внутрішнім механічним зворотнім зв'язком
При переміщенні золотника гнучка частина заслонки зі сферичною поверхнею (струна) згинається, при цьому виникає сила, спрямована проти дії на заслінку магнітних сил, створюваних катушкою керування. Переміщення золотника продовжується доти, поки ці сили не зрівноважаться. Отже, у таких конструкціях хід золотника прямо пропорційний силі струму в катушках керування перетворювача сигналів. Основною перевагою схем з механічним зворотнім зв'язком є висока швидкодія, стабільність характеристик при зміні температури, відсутність центруючих пружин на торцях золотника.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.