Після установки каркаса котушки на оправлення верстата до кінця намотувального проводу припаюють вивідний провід з наступною ізоляцією місця пайки. Намотавши. 1,5— 2 витки вивідного проводу на каркас котушки убік, зворотній напрямку намотування, закріплюють кінці вивідного проводу. При намотуванні спочатку заповнюють простір між витками вивідного проводу і щокою каркаса котушки, а потім роблять намотування на всю довжину каркаса.
Готову котушку попередньо сушать, а потім просочують лаком ДО-57 для підвищення електричної і механічної міцності ізоляції, стійкості до впливів атмосфери з наступним сушінням.
Остаточно виготовлену котушку піддають контролю з використанням спеціальних установок на відсутність короткозамкнутих витків, визначають електричний опір і міцність ізоляції.
Тема 2.3 Складання та регулювання
Складання починають з монтажу зовнішньої фторопластової захисної прокладки 15 і гумового ущільнювального кільця 14 «механічної пружини» і установки якоря в корпус перетворювача до повного контакту по конусних поверхнях пружини 16 і корпуса 2 (мал. 16).
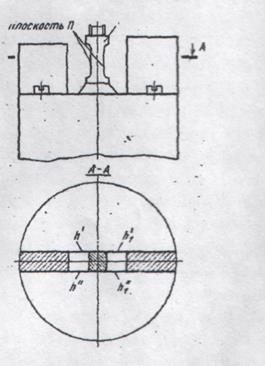
Забезпечивши зазор D3= 0,5—0,7 мм за рахунок підбора відповідної товщини шайби 13 і поставивши розрізну втулку 12, затягують гайку 11 з моментом 1,3+0,2 кгс-м. Наступною операцією є контроль паралельності поверхонь заслонки. Для цього на корпус перетворювача встановлюють спеціальне пристосування і за допомогою мікроскопа перевіряють розміри, як показано на мал. 18. Різниця розмірів h' — h'' іh'1 — h''1 повинна бути не більш 4 мкм. Якщо непаралельність площин заслонки щодо осі складальної одиниці якоря більше цього значення, то, відпустивши гайку 11 і повертаючи складальну одиницю якоря, домагаються необхідної паралельності.
Далі роблять установку першого магніта 3, котушки 4, другого магніта 9, магнітопроводів 5 і 10 і кріплення до корпуса 2 (див. мал. 10). Усі кріпильні гвинти і болти після остаточного регулювання контруются клеєм ВК-ІМ. Зібраний перетворювач піддається намагнічуванню в спеціальній установці.
Мал. 16.
Остаточне регулювання робиться з використанням спеціального пристосування, виконаного за схемою, приведеної на мал. 17. Зсув заслонки визначають індикатором 2 з ціною поділки 1мкм. Контакт між голкою 3 пристосування і заслінкою визначається в момент загоряння контрольної лампи 5. Попереднє настроювання пристосування роблять мікрометричним гвинтом 4.
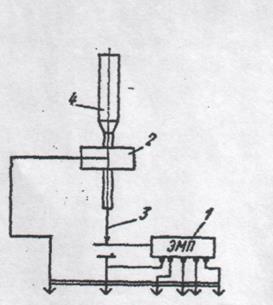
Мал. 17.Схема пристосування для контролю перетворювача.
Остаточне регулювання роблять після перевірки правильності переміщення заслонки в залежності від напрямку керуючого струму.
Після контролю правильності виставляння повітряних зазорів між регулювальними гвинтами і якорем при попередньому регулюванні перетворювач підключають до спеціального пульта контролю. Для визначення ходу заслінку встановлюють у нейтральне положення, зробивши граничний цикл перемагнічування, що відповідає діапазону керуючих
Iyoвід Io до Iy мах, від Iy мах до Iyo, від Iyo до Iy мах і від -Iy мах до Iyo.
Положення заслонки фіксують по показах індикатора пристосування відносно довільно обраної точки на помітки, розташованої на відстані L від торця корпуса перетворювача. Визначивши величину повного ходу заслонки в обидва боки і розділивши її навпіл, установлюють нейтральне положення заслонки, а індикатор ставлять на нуль. Подаючи послідовно максимальний керуючий струм різного напрямку, визначають хід заслонки від нейтрального положення Н. Якщо хід заслонки не укладається в межі допуску, то дозволяється підрегулювання повітряного зазору для забезпечення необхідного значення.
Визначень величини струму, при. якому заслонка утримується в нейтральному положенні, при силі, що імітує реакцію струменя на заслінці (по осі сопел) Rн , роблять наступним шляхом: приклавши до заслонки по осі сопел Яф вантажу, подають Iу в обмотки перетворювача і збільшують його до величини, що повертає заслонку в нейтральне положення. Величина Іу повинна бути (0,9—1) Iy мах , а різницю їхніх абсолютних значень при різній полярності не більш 2 мА. Визначення залежності ходу заслінки від струму керування роблять при поступовій зміні Iy від 0 до + Iy мах, від + Iy мах до 0; від 0 до - Iy мах; від - Iy розумах до 0 і від 0 до + Iy мах з фіксуванням значень через кожні 2 мкм переміщення заслонки на всьому діапазоні робочого ходу
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.