Загальними перевагами гідроприводу з дросельним керуванням є простота конструкції, висока надійність і низька вартість регулюючої апаратури і насосів, широкий діапазон регулювання швидкості, можливість у ряді схем здійснення переміщень із малими швидкостями, простота одержання жорсткої навантажувальної характеристики, висока швидкодія. Але в силу великих втрат потужності при малих швидкостях переміщення виконавчих пристроїв, вони застосовуються при невеликих потужностях, звичайно не більш 3 кВт.
Для
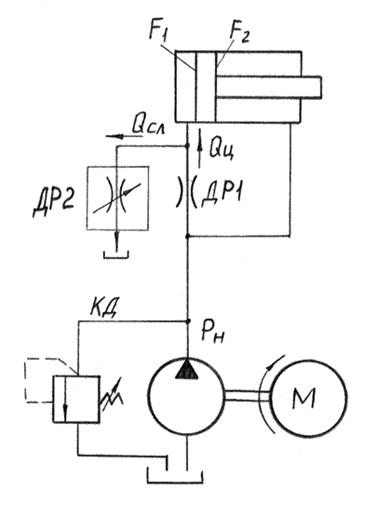
диференційно-дросельного регулювання частіше беруть відношення  . Якщо дросель Др2 закритий, то
відбувається рух вправо з швидкістю
. Якщо дросель Др2 закритий, то
відбувається рух вправо з швидкістю ![]() , якщо Др2
відкритий, то відбувається рух вліво з швидкістю
, якщо Др2
відкритий, то відбувається рух вліво з швидкістю ![]() .
.
В даній схемі (рис. 4.19) циліндр підключається диференційно, а напрямок руху поршня і величина швидкості забезпечуються двома дроселями Др1 і Др2, які підключені до порожнини циліндру з більшою площею.
|
|
Переваги диференційно-дросельного регулювання: 1) велика чутливість, так як обидві порожнини знаходяться під тиском; 2) незначний вплив на швидкість мають витоки в циліндрі; 3) виключена можливість попадання повітря в циліндр; 4) відсутній розподільник. |
|
|
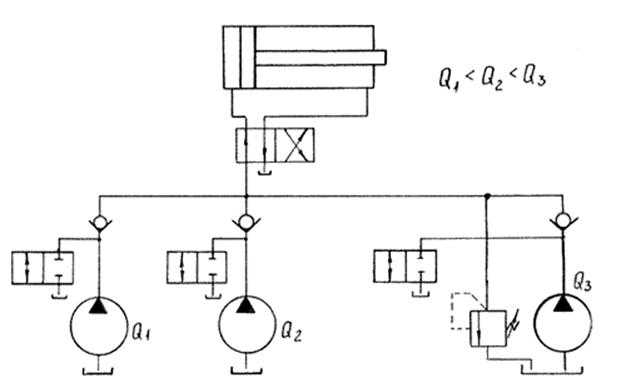
В даній схемі (рис. 4.20) присутні три насоси. Якщо підключати насоси до системи у відповідній комбінації, то можна отримати різні витрати (швидкості руху поршня).
Кількість швидкостей визначається наступним виразом
![]() , де
z – кількість насосів.
, де
z – кількість насосів.
Для схеми рис. 9 можна отримати вісім швидкостей ( восьма – нульова).
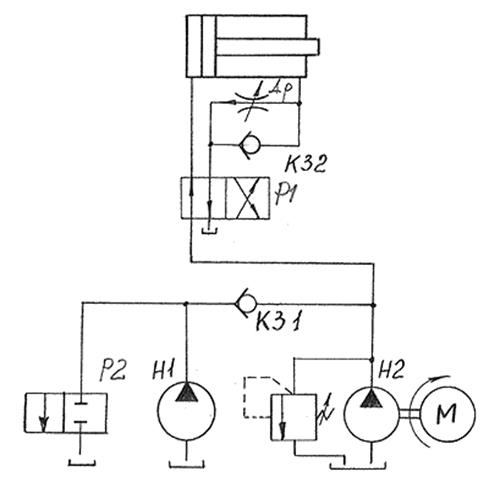
Комбіноване регулювання швидкості об’єднує ступеневе та дросельне регулювання (рис. 4.21).
При холостому ході навантаження мінімальне. Рідина від двох насосів поступає у гідродвигун, швидкість максимальна – швидке переміщення.
При збільшенні навантаження тиск в системі збільшується, насос Н1 відключається розподіль-ником Р2, система ізолюється зворотним клапаном КЗ1. Гідросистема живиться тільки від насоса Н2, а швидкість регулюється дроселем.
|
|
Література [5], стор. 102-109, [13], стор. 188-195.
В станках та машинах спеціального призначення нерідко перед режимною швидкістю, що відповідає процесу обробки виробу та технологічної операції після швидкого підводу робочого органу, необхідно забезпечити повільний рух чи його рух на двох подачах: спочатку на першій робочій подачі, а потім на другій.
Для автоматичного перемикання швидкостей із положення “ШВИДКО ВПЕРЕД”, а потім на робочу подачу, або ж після “ШВИДКОГО ПІДВОДУ” – на “ПЕРШУ РОБОЧУ”, далі – на другу в практиці машинобудування використовують декілька способів підключення регуляторів швидкостей та іншої апаратури, взаємодія котрих забезпечує заданий цикл роботи.
В схемі, показаній на рис.4.22, рух поршня відбувається за таким циклом: “ШВИДКО ВПЕРЕД” – “ПОВІЛЬНИЙ ПІДВІД” –“РОБОЧА ПОДАЧА”.
 |
Рис 4.22.
Спочатку, при швидкому русі поршня вправо, рідина від циліндра відводиться до реверсивного золотника та далі в бак по магістралі 1. Після перекриття проточки “а” магістраль 1 в цьому місці відсікається: і подальший відвід рідини можливий лише із проточи “б” по магістралі 2 через дросель Др1 та магістраль 1. Тепер швидкість руху визначається налаштуванням дроселя ДР1, що відповідає повільному підводу.
Автоматичне перемикання на робочу подачу відбудеться після перекриття проточки “б”. При цьому дросель Др1 відсікається, а рідина із циліндра почне відводитися магістраллю 3 через регулятор потоку РП.
Деяке ускладнення циліндро - поршневої групи, зумовлене наявністю двох кільцевих проточок, відстань між якими визначається довжиною переміщення при русі поршня за циклом “ПОВІЛЬНИЙ ПІДВІД”, а також дроселем Др1, вмонтованого безпосередньо в циліндр, виправдане тим, що автоматичне перемикання швидкостей здійснюється при наявності в схемі малої кількості функціональних вузлів.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.