Розглянемо регулювальні характеристики гідропривода з регульованим насосом, що являють собою залежність вихідних параметрів гідропривода від параметра регулювання. Для одержання якісних залежностей зневажимо втратами потужності в приводі.
Залежність частоти обертання вала гідромотора nм від параметра регулювання ен визначається виразом (4.6). Момент, що розвивається є постійний. Потужність, що розвивається гідромотором, дорівнює
 ,
,
![]() . (4.13)
. (4.13)
На рис. 4.3 подані графічні
залежності розглянутих характеристик. З них видно, що гідропривод с
регульованим насосом розвиває постійний при заданому навантаженні момент,
незалежний від частоти обертання вала  гідромотора і потужність пропорційна
частоті обертання.
гідромотора і потужність пропорційна
частоті обертання.
Рис.4.3. Регулювальна характеристика
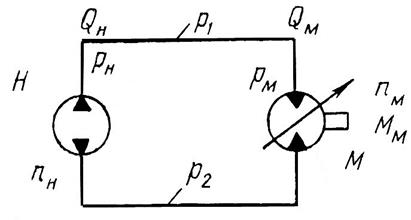
Гідроприводи з регульованим насосом знайшли найбільше застосування серед приводів із машинним керуванням. Вони застосовуються там, де силові можливості гідропривода не повинні залежати від швидкості руху вихідних ланок. Наприклад, вони застосовуються в гідроприводах верстатів, колісно-гусеничних машин, поворотних споруджень і т.п.
Спрощена гідравлічна схема приводу показана на рис. 4.4. На схемі непоказаний блок захисних клапанів і система підживлення насоса, що також присутні як і в гідроприводі з регульованим насосом.Реверс вала гідромотора, як правило, здійснюється шляхом установки в гідролініях четирьохлінійного направляючого розподільника.
Залежності тиску, частоти обертання, потужності і ККД від моменту навантаження мають той же вид, що і для попереднього приводу.
Розглянемо регулювальні характеристики приводу. Теоретична частота обертання
![]()
вала гідромотора визначається наступним виразом:
 . (4.14)
. (4.14)
Найменша частота обертання має місце при максимальному параметрі регулювання ем мах=1
 .
.
З зменшенням параметра регулювання ем частота обертання nм зростає (рис. 4.5, крива 1). Очевидно, що забезпечити роботу гідромотора з малою частотою обертання неможливо, тому що для цього треба або зменшувати робочий об’єм насоса Voн, або збільшувати максимальний робочий об’єм гідромотора Voм max. Але при зменшенні Voн зменшується передана гідроприводом потужність, а при збільшенні Voм max зростають габаритні розміри приводу. Крім того, із зменшенням відношення Voн / Voм max регулювальна характеристика зміщується вниз (крива 2). Кут нахилу характеристики в більшому діапазоні зміни ем зменшується, що знижує швидкодію приводу.
З зменшенням параметра регулювання частота обертання вала гідромотора може теоретично зрости до нескінченності. У дійсності вона обмежена розміром nм mах. Це пояснюється тим, що момент, який розвивається гідромотором Mмт, зменшується зі зменшенням параметра регулювання
 , (4.15)
, (4.15)
і при ![]() він
стає рівним моменту, необхідному для подолання
він
стає рівним моменту, необхідному для подолання
Рис. 4.5. Характеристики
гідропривода з регульованим гідромотором механічних втрат у самому
гідромоторі, тобто при ![]() гідропривод
перетворюється в систему, що самогальмується
гідропривод
перетворюється в систему, що самогальмується
Перевагою гідропривода з регульованим гідромотором є робота з постійною потужністю при заданому навантаженні у всьому діапазоні регулювання швидкості, тому що
![]() . (4.16)
. (4.16)
Це дозволяє застосовувати для приводна насоса двигун обмеженої потужності, що важливо, наприклад, при використанні гідропривода в трансмісіях мобільних машин.
До недоліків розглянутого гідропривода варто віднести наступні. Ручне або механічне керування гідроприводом складно, тому що звичайно гідромотор віддалений від місця розташування оператора. При дистанційному керуванні цєї недолік не проявляється. Привід не забезпечує малі швидкості, при котрих звичайно починається рух виконавчих пристроїв.
Діапазон регулювання швидкості при регулюванні гідромотором менше, ніж при регулюванні насосом..
Кращим є застосування аксіально - поршневих гідромоторів із похилим блоком циліндрів, тому що гідромеханічні втрати в них найменші.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.