![]() (3.49)
(3.49)
де рн — тиск живлення; ![]() — перепади тисків відповідно у щілинах первинного і вторинного
дроселювання (витрати Q1і Q4),
— перепади тисків відповідно у щілинах первинного і вторинного
дроселювання (витрати Q1і Q4), ![]() ,
,![]()
![]() — навантаження
(перепад тисків у робочих порожнинах гідродвигуна); р = р1
— р2, р3л—тиск у зливній гідролінії.
— навантаження
(перепад тисків у робочих порожнинах гідродвигуна); р = р1
— р2, р3л—тиск у зливній гідролінії.
Зазначимо, що таке визначення навантаження р розподільника правомірне тільки для гідродвигуна із симетричними швидкісними характеристиками в протилежних напрямах руху. Із врахуванням останнього зауваження і за законом збереження маси (витрати) при протіканні рідини через підсилювач можна записати:
Qн=Q1+Q3;Q=Q1-Q2;
Qн=Q2+Q4;Q=Q4-Q3. (3.50)
На підставі рівностей витрат місток опорів буде цілком симетричний, тому
![]()
Приймаючи для , більшості випадків практичного застосування /?зл = 0. дістанемо
Втрати тиску в дроселюючій
щілині 
де v —
середня швидкість течії рідини у вікні, v= Q/ S; ![]() — масова густина рідини;
— масова густина рідини; ![]() — коефіцієнт гідравлічних втрат; S— площа
дроселюючої
щілини,
— коефіцієнт гідравлічних втрат; S— площа
дроселюючої
щілини, ![]() в- діаметр золотника
в- діаметр золотника
Витрата рідини через розподільник
 ,
(3.51)
,
(3.51)
де ![]() —
коефіцієнт витрати,
—
коефіцієнт витрати, ![]() .
.
![]()
З урахуванням навантаження розподільника
![]() (3.52)
(3.52)
За відсутністю навантаження (p = 0) витрати рідини через розподільник
 (3.53)
(3.53)
де k — коефіцієнт підсилення за витратами,
k=
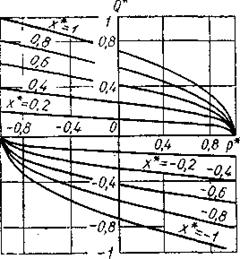
Отже, в ідеальному розподільнику має місце лінійна залежність витрати рідини Qвід сигналу керування (переміщення золотника) x. Ця властивість золотникових розподільників має надзвичайно важливе практичне значення, яке зумовило широке їхнє застосування, особливо у слідкуючих гідроприводах і в системах автоматики. В реальному ж золотниковому підсилювачі витрата рідини при постійному зміщенні х золотника залежить від навантаження (рис. 3.63) . При постійному навантаженні залежність витрати від зміщення золотника залишається практично лінійною.
|
|
.
|
Рис. 3.63. Статична характеристика золотникового підсилювача |
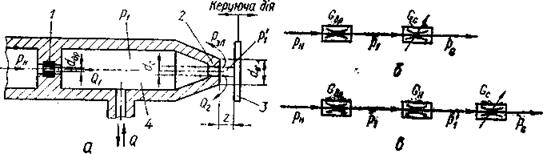
У гідравлічних слідкуючих системах широко застосовуються гідропідсилювачі типу сопло-заслінка (рис. 3.64), які являють собою послідовне з'єднання постійного і регульованого гідравлічних опорів. На вході гідропідсилювача встановлюється дросель / постійного опору, на виході — регульований дросель, утворений торцем сопла 2 і рухливою заслінкою 3. Переміщення заслінки 3 викликає зміну гідравлічного опору регульованого дроселя, а це призводить до зміни витрати рідини Q2 через регульований дросель, а також тиску р1у міждросельній камері 4.
Простота конструкції і відсутність поверхонь тертя у гідропідсилювачах типу сопло-заслінка обумовили їхнє широке застосування у системах автоматичного управління. При застосуванні цих гідропідсилювачів усувається сухе тертя і небезпека защемлення керуючих елементів. Вони відрізняються малими габаритами і вагою, для них характерна висока чутливість, точність і швидкодія, простота виготовлення і довговічність, що досягається завдяки безконтактній взаємодії.
|
|
У гідропідснлювачах типу сопло-заслінка застосовують схему з двома соплами (рис. 3.65). Навантаження підсилювача являє собою перепад тиску в робочих порожнинах
|
Рис. 3.64. Конструктивна та гідравлічна схеми гідропідсилювача типу сопло-заслінка |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.