|
|
||||||
|
|||||||
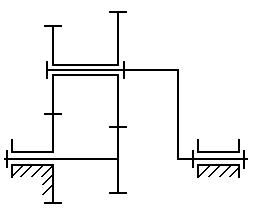
Кинематическая
схема на рис. 3.1.а с центральными колесами ![]() и
и
![]() , водилом
, водилом ![]() и
сателлитом
и
сателлитом ![]() является простейшей планетарной
передачей с передаточным отношением
является простейшей планетарной
передачей с передаточным отношением ![]() . Ее особенность
заключается в применении нескольких сателлитов, расположенными с равными
угловыми шагами. При такой кинематической многосателлитной передачи имеется
несколько зон зацепления (в зависимости от числа сателлитов) с центральным
колесом. Такая многопоточная передача энергии одновременно несколькими
зубчатыми парами позволяет уменьшить габариты и массу планетарных передач по
сравнению с обычными рядовыми зубчатыми передачами. Обычно число сателлитов
назначают от 3 до 6. Чтобы сателлиты были нагружены равномерно, требуется
высокая точность изготовления передачи. При высокой точности изготовления и
сборки число сателлитов можно увеличить до 10…12.
. Ее особенность
заключается в применении нескольких сателлитов, расположенными с равными
угловыми шагами. При такой кинематической многосателлитной передачи имеется
несколько зон зацепления (в зависимости от числа сателлитов) с центральным
колесом. Такая многопоточная передача энергии одновременно несколькими
зубчатыми парами позволяет уменьшить габариты и массу планетарных передач по
сравнению с обычными рядовыми зубчатыми передачами. Обычно число сателлитов
назначают от 3 до 6. Чтобы сателлиты были нагружены равномерно, требуется
высокая точность изготовления передачи. При высокой точности изготовления и
сборки число сателлитов можно увеличить до 10…12.
Принимая
(рис. 3.1,а) неподвижным звено с ![]() механизм имеет
передаточное отношение
механизм имеет
передаточное отношение ![]() . При неподвижном
водиле
. При неподвижном
водиле ![]() передача будет рядовой с
передаточным отношением
передача будет рядовой с
передаточным отношением ![]() . При обозначении
передаточных чисел употребляют определенную систему индексов: верхний индекс в
скобках соответствует обозначению остановленного (неподвижного) звена, а два
нижних индекса соответствуют передаче движения от входного звена к выходному.
Обозначение соответствует передаточному отношению планетарной передачи от
входного звена 1 к выходному звену
. При обозначении
передаточных чисел употребляют определенную систему индексов: верхний индекс в
скобках соответствует обозначению остановленного (неподвижного) звена, а два
нижних индекса соответствуют передаче движения от входного звена к выходному.
Обозначение соответствует передаточному отношению планетарной передачи от
входного звена 1 к выходному звену ![]() при опорном (неподвижном) звене 3.
обозначение
при опорном (неподвижном) звене 3.
обозначение ![]() соответствует
передаточному отношению зубчатой передачи от входного звена 1 к выходному звену
3 при опорном (неподвижном) звене
соответствует
передаточному отношению зубчатой передачи от входного звена 1 к выходному звену
3 при опорном (неподвижном) звене ![]() .
.
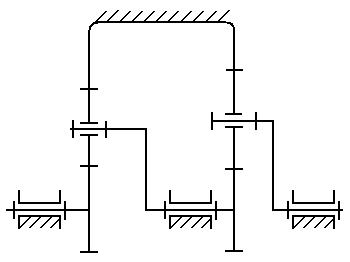
Кинематическая схема на рис. 3.1,б имеет
центральные колеса ![]() и
и ![]() , блок сателлитов
из колес
, блок сателлитов
из колес ![]() ,
,![]() и
водило
и
водило ![]() . Колесо
. Колесо ![]() имеет внутренние зубья. Минимальные
размеры передача имеет при наибольшей разности в диаметрах колес
имеет внутренние зубья. Минимальные
размеры передача имеет при наибольшей разности в диаметрах колес ![]() и
и ![]() . Такую кинематическую схему используют обычно при закрепленном
звене 4 для передаточных отношений
. Такую кинематическую схему используют обычно при закрепленном
звене 4 для передаточных отношений ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.