4.1. Исходные данные:
|
Величина |
αω, мм |
Z4 |
Z5 |
m1, мм |
I1H-3 |
m2, мм |
|
Значение |
135,0 |
11,0 |
22,0 |
8,0 |
6,5 |
4,0 |
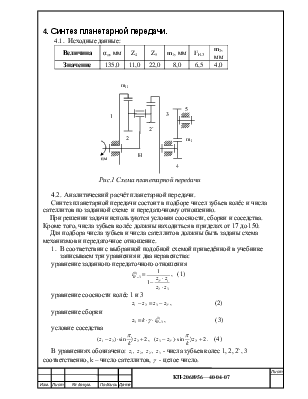
Рис.1 Схема планетарной передачи
4.2. Аналитический расчёт планетарной передачи.
Синтез планетарной передачи состоит в подборе чисел зубьев колёс и числа сателлитов по заданной схеме и передаточному отношению.
При решении задачи используются условия соосности, сборки и соседства. Кроме того, числа зубьев колёс должны находиться в приделах от 17 до 150.
Для подбора числа зубьев и числа сателлитов должны быть заданы схема механизмов и передаточное отношение.
1. В соответствии с выбранной подобной схемой приведённой в учебнике записываем три уравнения и два неравенства:
уравнение заданного передаточного отношения
 , (1)
, (1)
уравнение соосности колёс 1 и 3
![]() , (2)
, (2)
уравнение сборки
![]()
![]() ,
(3)
,
(3)
условие соседства
 ,
,  .
(4)
.
(4)
В
уравнениях обозначено: ![]() ,
, ![]() ,
, ![]() ,
, ![]() - числа зубьев колес 1, 2, 2`, 3
- числа зубьев колес 1, 2, 2`, 3
соответственно, k –
число сателлитов, ![]() - целое число.
- целое число.
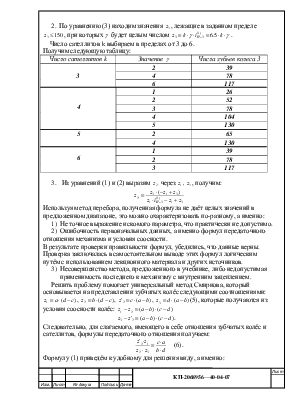
2.
По уравнению (3) находим значения ![]() , лежащие в заданном пределе
, лежащие в заданном пределе
![]() ,
при которых
,
при которых ![]() будет целым числом
будет целым числом ![]() .
.
Число сателлитов k выбираем в пределах от 3 до 6.
Получим следующую таблицу:
|
Число сателлитов k |
Значение |
Числа зубьев колеса 3 |
|
|
2 |
39 |
|
4 |
78 |
|
|
6 |
117 |
|
4 |
1 |
26 |
|
2 |
52 |
|
|
3 |
78 |
|
|
4 |
104 |
|
|
5 |
130 |
|
|
|
2 |
65 |
|
4 |
130 |
|
|
6 |
1 |
39 |
|
2 |
78 |
|
|
3 |
117 |
3.
Из уравнений (1) и (2) выразим ![]() через
через
![]() ,
, ![]() , получим:
, получим:
Используя метод перебора, полученная формула не даёт целых значений в предложенном диапазоне, это можно охарактеризовать по-разному, а именно:
1) Не точное выражение искомого параметра, что практически не допустимо.
2) Ошибочность первоначальных данных, а именно формул передаточного
отношения механизма и условия соосности.
В результате проверки правильности формул, убедились, что данные верны.
Проверка заключалась в самостоятельном выводе этих формул логическим путём с использованием лекционного материала и других источников.
3) Несовершенство метода, предложенного в учебнике, либо недопустимая применимость последнего к механизму с внутренним зацеплением.
Решить проблему помогает универсальный метод Смирнова, который основывается на представлении зубчатых колёс следующими соотношениями:
![]() ,
,
![]() ,
, ![]() ,
,
![]() (5), которые получаются из условия
соосности колёс:
(5), которые получаются из условия
соосности колёс: ![]()
![]() .
.
Следовательно, для слагаемого, имеющего в себе отношения зубчатых колёс и сателлитов, формулы передаточного отношения получаем:
 (6).
(6).
Формулу (1) приведём к удобному для решения виду, а именно:
 .
.
Подставляя заданное передаточное отношение от водила Н – третьему колесу при неподвижном первом колесе и умножая обе части на -1, получим:
 .
.
Помножим число ![]() на 10
и представим в виде сомножителей:
на 10
и представим в виде сомножителей: ![]() .
.
И ориентируясь на соотношение
(6), получим:  , подставляя их в
соотношения (5), получаем исходные числа зубьев колёс и сателлитов:
, подставляя их в
соотношения (5), получаем исходные числа зубьев колёс и сателлитов:  (знак “-” не учитываем, берём модуль).
(знак “-” не учитываем, берём модуль).
Полученный результат допустим, т.к. механизм будет работать в этом случае (без опорного колеса и одного сателлита). Это объясняется следующим образом: диаметры сателлита и подвижного колеса одинаковы, зацепление осуществляться будет и передаточное отношение сохраняется. Водило Н будет задавать движение (вращение) сателлита по тому же закону, что и движется сам, а сателлит в свою очередь будет вращать колесо 3.
Комбинируя множители
другим образом, получим: ![]() . Выполняя те же действия, имеем:
. Выполняя те же действия, имеем:
при  ,
значения
,
значения  .
.
Полученные значения
охарактеризуем следующим образом: такой вариант предлагает нам схему с внешним
зацеплением, когда сателлит ![]() бегает по
опорному колесу 1, а
бегает по
опорному колесу 1, а ![]() в свою очередь по
подвижному колесу 3, тем самым, приводя его в движение. Передаточное отношение
сохраняется, механизм работает при полученном варианте.
в свою очередь по
подвижному колесу 3, тем самым, приводя его в движение. Передаточное отношение
сохраняется, механизм работает при полученном варианте.
Если ![]() , то
, то
 , а
, а  .
.
Этот вариант аналогичен первому, принцип его правильности доказывается такими же рассуждениями.
И, наконец, при
комбинации ![]() ,
,  , следовательно,
, следовательно,  . Полученные значения проверим,
подставив их в формулу (1):
. Полученные значения проверим,
подставив их в формулу (1):  . По условию
. По условию ![]() , получили тождество. При изображении планетарного
механизма в масштабе, используя значения последнего варианта, получаем
механизм, у которого оси колёс 1 и 3 совпадают, следовательно, условие
соосности выполняется. На этих основаниях можно полагать, что полученные данные
– верны.
, получили тождество. При изображении планетарного
механизма в масштабе, используя значения последнего варианта, получаем
механизм, у которого оси колёс 1 и 3 совпадают, следовательно, условие
соосности выполняется. На этих основаниях можно полагать, что полученные данные
– верны.
Вариантов представления очень много, и очевидно, что при правильной компоновке все они будут верны.
Последний вариант подходит для того, что бы использовать его в дальнейшем исследовании механизма, но на колёса 1 и 3 накладываются следующие условия:
![]() .
.
Эти условия выполнены, но при
ограничении ![]() только лишь от
только лишь от ![]() , будет наблюдаться эффект подрезания зубьев, что
вообще говоря не желательно.
, будет наблюдаться эффект подрезания зубьев, что
вообще говоря не желательно.
Подрезания не будет в том
случае, если ![]() , следовательно, колесо 3
не соответствует поставленному условию.
, следовательно, колесо 3
не соответствует поставленному условию.
Смотрим по полученной ранее таблице следующее ближайшее число зубьев колеса 3, очевидно оно равно 104, следовательно, необходимо увеличить зубья колеса 3 на 26. Для обеспечения заданного передаточного отношения, необходимо повысить число зубьев опорного колеса и сателлитов ровно во столько же раз. Это сделать невозможно при таком варианте, т.к. число зубьев колеса 3 возросло ровно на 33,333(3)%, при увеличении других колес во столько же раз, мы не сможем получить целое число зубьев. Это объясняется тем, что число зубьев 104 колеса 3 будет выполняться в том случае, если сателлитов будет 4, а в нашем случае их 2.
Берём следующее
значение равное 117. Ровно в ½ раза увеличивается число зубьев опорного колеса
и сателлитов. Произведём проверку на сохранение передаточного отношения:  , и
т.к.
, и
т.к. ![]() ,
снова получили тождество.
,
снова получили тождество.
Теперь, когда все условия выполнены, можно преступить к графическому методу, но сначала, для проверки правильности решения задачи определяем передаточное отношение зубчатого механизма. Общее передаточное отношение зубчатого механизма равно произведению передаточных отношений планетарной ступени и пары зубчатых колёс 4 и 5:
 .
.
Знак минус указывает на то, что водило Н и колесо 5 вращаются в противоположных направлениях.
Графическое представление рассматриваемого механизма.
Необходимо графическим методом определить передаточное отношение
Зубчатого механизма.
Алгоритм проведения графического анализа:
1) Находим начальные диаметры колёс планетарной передачи и
вычерчиваем кинематическую схему механизма в масштабе 1:1.
2) Строим план линейных скоростей. На вертикальную линию проецируем
все кинематические пары механизма. Т.к. движение задаёт водило Н, то из
точки о проводим под любым углом линию, до пересечения с линией bb`, тем самым задавая начальную скорость вращения. Из точки b` проводим прямую линию в точку а, лежащую на оси, получаем скорость движения сателлита 2 по опорному колесу 1. Из точки с проводим перпендикуляр на линию b`a, получаем точку c`. Из точки о проводим линию в точку c`, получаем скорость движения кинематической пары С. Т.к. скорость движения колеса 4 задаёт колесо 3, то на линию скорости колеса 3 проецируем точку е, получаем е`. Замыкаем план линейный скоростей в конечной точке f из точки е`.
3) Строим план угловых скоростей. На продолжении линии оа откладываем
отрезок PS произвольной длины. Из точки P проводим прямые, параллельные линиям ob`, oc`, e`f, b`a, до пересечения их в точках 2, 4-5, 2`-3, Н с перпендикуляром к линии PS.
4) Из рисунка определяем передаточное отношение планетарной передачи:
 .
.
Тогда общее передаточное отношение зубчатого механизма
 .
.
Результаты построений находятся в приложении 5.
Составим таблицу полученных значений:
|
Передаточное отношение Метод |
Планетарная ступень
|
Зубчатый механизм
|
|
Аналитически |
6,5 |
-13 |
|
Графически |
6,5089 |
-12,941 |
|
Отклонение, % |
0,137 |
0,454 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.