Министерство общего и профессионального образования
Российской Федерации
Новосибирский государственный технический университет
Кафедра прикладной механики
Пояснительная записка
К курсовому проекту по теории машин и механизмов
на тему: Анализ и синтез гидропульсационной машины
Выполнил: Платонов А.Н.
Специальность (направление) 1201, технология машиностроения
Обозначение проекта КП-2068956-40-15-01
Группа ТМ-92
Руководитель проекта Смелягин А.И.
Проект защищен Оценка
Члены комиссии
Новосибирск
2001
1 Структурный анализ механизма кислородного двухцилиндрового компрессора
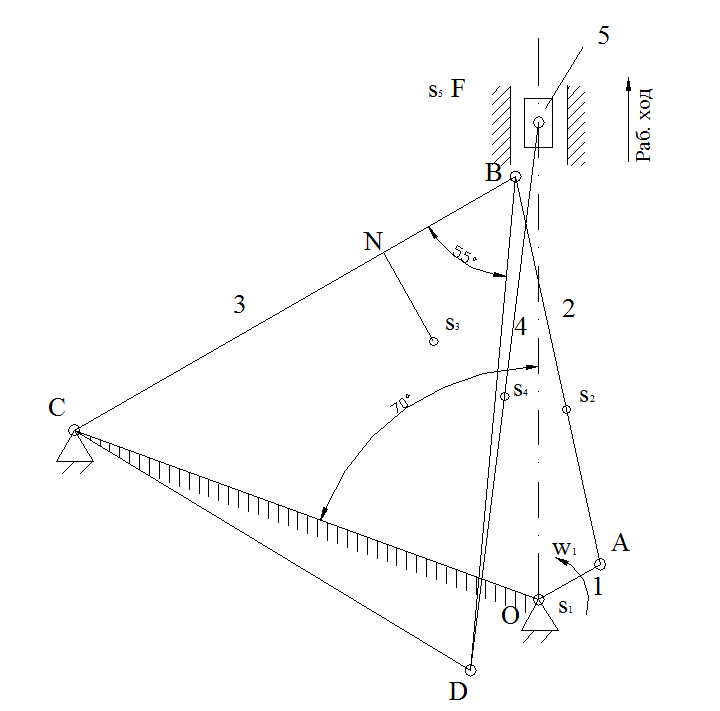 |
Рисунок 1.1 - Структурная схема компрессора.
1.2 Aнализ кинематических пар механизма
Таблица 1 - Классификация кинематических пар
|
Номер звеньев, образующих пару |
Условное обозначение |
Название |
Подвижность |
Высшая/ Низшая |
Замыкание |
Открытая/ Закрытая |
|||
|
|
O |
Вращательная |
1 |
Н |
Г |
З |
|||
|
|
A |
Вращательная |
1 |
Н |
Г |
З |
|||
|
|
B |
Вращательная |
1 |
Н |
Г |
З |
|||
|
|
C |
Вращательная |
1 |
Н |
Г |
З |
|||
|
|
D |
Вращательная |
1 |
Н |
Г |
З |
|||
|
4-5 |
Вращательная |
1 |
Н |
Г |
З |
||||
|
5-0 |
Поступательная |
1 |
Н |
Г |
З |
Исследуемый механизм состоит только из одноподвижных кинематических пар (Р1=7, Р2=7 ) ,
Где Р- общее число кинематических пар в механизме.
1.3 Классификация звеньев механизма
Таблица 2 - Классификация звеньев механизма
Механизм имеет:
- четыре (п2= 4) двухвершинных (t= 2) звена 1,2,4,5;
|
Номер звена |
Условное обозначение |
Название |
Движение |
Число вершин (t) |
|
0 |
|
Стойка |
Отсутствует |
- |
|
1 |
|
Кривошип |
Вращательное |
2 |
|
2 |
|
Шатун |
Сложное |
2 |
|
3 |
|
Коромысло |
Качательное |
3 |
|
4 |
|
Шатун |
Сложное |
2 |
|
5 |
|
Ползун |
Поступательное |
2 |
- одно (п3= 1) трёхвершинное (t= 3) звено 3, которое является базовым
- пять (п= 5) подвижных звеньев.
1.4 Классификация механизмов гидропульсационной машины.
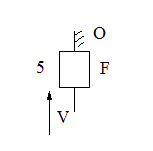
Механизм гидропусационной машины имеет 3 присоединения к стоике ( пары О,С,F)
 |
а) один элементарный механизм:
в) один простой механизм (шарнирный четырёхзвенник)
Машина имеет в своем составе только простые стационарные механизмы.
В исследуемом механизме звеньев закрепления нет.
Исследуемый механизм имеет постоянную структуру, является сложным и однотипным. Он состоит из одного элементарного механизма и одного стационарного простого, который имеет в своём составе только замкнутые кинематические цепи.
Анализ движения звеньев механизма и элементов кинематических пар показывает, что механизм существует в трёхподвижном пространстве (П=3)
1.5 Определение подвижности простых механизмов компрессора
W=3n-2p1 -р2
W=p1+2p2-3k
K=p-n
Подвижность шарнирного механизма:
где n - число подвижных звеньев;
p1 - число одноподвижных кинематических пар;
При n=5 и р=р1=7, р2=0
Wш=3*5-2*7=1.
К=7-5=2
Wш=7+2*0-3*2=1
1.10 Определение подвижности сложного механизма
Wсм=Wш-(K3-1),
где К3 - звено присоединения
Wсм=Wш-(1-1)=1.
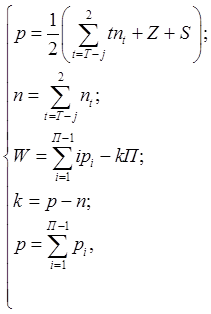
1.11 Анализ структурной математической модели исследуемого механизма
Проверка соответствия механизма структурной математической модели
Механизм имеет:
- Семь (р=7) одноподвижных (р1=7) кинематических пар;
- Пять (п=5) подвижных звеньев, из которых одно (п3=1) базовое (Т=3) трёхвершинное (t=3) и четыре (п=4) двухвершинных (t=2);
- Три присоединения к сиойке (S=3);
- Звеньев закрепления нет (Z=0).
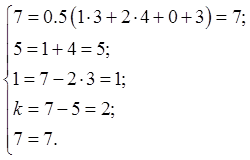 |
Уравнения структурной математической модели превратились в тождества, значит, исследуемое устройство имеет правильную структуру и является механизмом.
1.12 Структурный анализ механизмов с использованием структурной математической модели
1.12.1 Определение структурных групп Ассура
В механизме компрессора выделяются две структурные группы
 |
 |
1.12.2 Анализ выделенных структурных групп
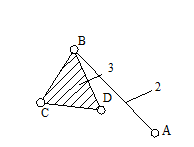
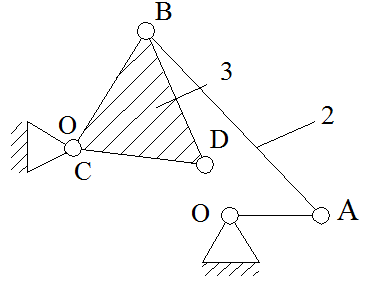
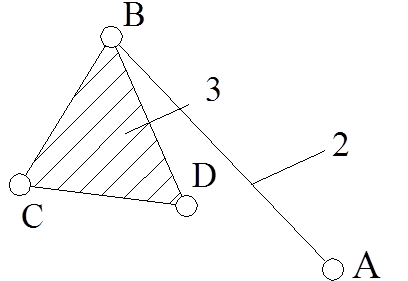
выделенные структурные группы подобны по видовому и количественному составу звеньев и кинематических пар. Структурная группа 1 имеет :
- два подвижных звена (п1'=2), причём одно звено двухвершинное (t=2), другое звено трёхвершинное (t=3) , базовое звено 3 имеет три вершины (Т=3)
- четыре (р=4) одноподвижные кинематические пары, из которых три внешние (S'=3)
проверим соответствие выделенной структурной группы её математической модели (П=3)
(1.5)
 |
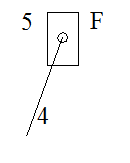
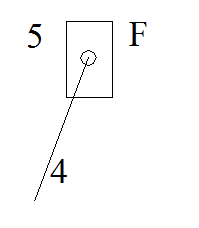
Структурная группа 2 (4-5) имеет:
- два неподвижных звена(п2'=2), оба звена двухвершинные (t=2);
- три (р=3) одноподвижных (р1=3) кинематические пары, из которых две (S'=2) внешние.
(1.6)
 |
Анализ полученных выражений показывает, что выделенные кинаматические цепи являются структурными группами Ассура.
1.13 Классификация структурных групп по И. И. Артоболевскому
Таблица 1.3 - Классификация структурных групп
|
Структурная схема |
Номер звеньев, образующих группу |
Класс, порядок, вид |
|
|
0-1 |
I класс |
|
|
2-3 |
II класс 2 - порядок 1 - вид |
|
|
4-5 |
II класс 2 - порядок 1 - вид |
1.14 Определение класса сложного механизма
Механизм гидропульсационной машины образован путём последовательного присоединения двух групп Ассура 2- го класса 2- го порядка к механизму первого класса, следовательно, я вляется механизмом 2- го класса.
2 Кинематический анализ механизма.
2.1 Определение крайних положений механизма
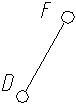
а) крайнее нижнее (начало рабочего хода)- звенья ОА и АВ лежат на одной прямой.
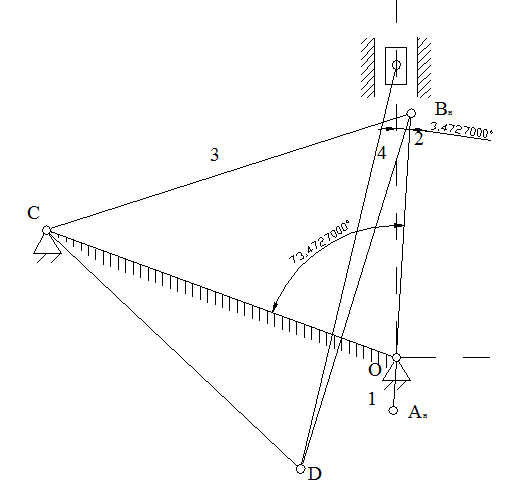 OBн=АВ-ОА=0,23 м;
OBн=АВ-ОА=0,23 м;
OC=0.35 м;
BC=0.36 м.
Записывают теорему косинусов для треугольника OBC
(2.1)
где: ![]()
Из формулы (2.1) определяют начальный угол механизма
 |
(2.2)
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.