Крайнее верхнее (конец рабочего хода)- точки О,А,В лежат на одной прямой
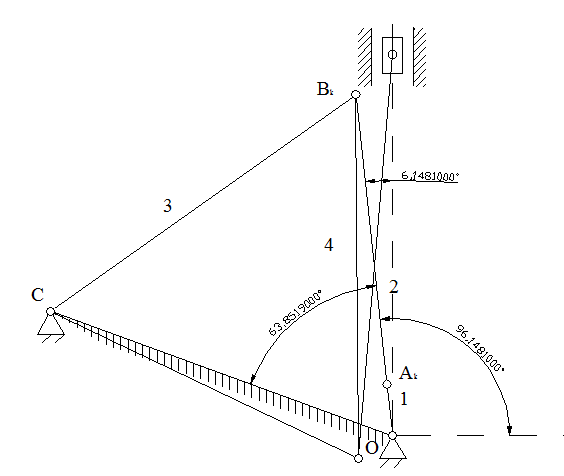
OBн=АВ-ОА=0,23 м;
![]()
 |
||
 |
||
За начальное положение механизма
приниманм положение, соответствующее крайнему нижнему положению звена 5 (![]() ), за конечное- крайнее верхнее (
), за конечное- крайнее верхнее (![]() )
)
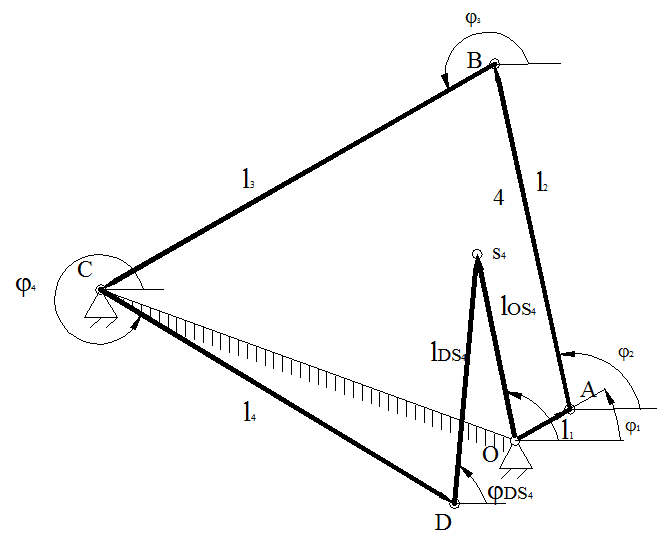
2.2.1 Определение положений механизма
 |
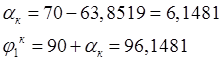
В соответствии с рисунком (2.2) записывают уравнение змкнутости первого векторного контура OABC
(2.5)
Для упрощения нахождения углов уравнение (2.5) записывают в виде двух простых уравнений
![]() (2.6)
(2.6)
(2.7)
Уравнение (2.6) записывают в проекциях на оси координат
 |
(2.8)
Из системы уравнений (2.8) определяют j7 и l7
 |
(2.9)
 |
(2.10)
Уравнение (2.7) записывают в проекциях на оси координат
 |
(2.11)
Из системы уравнений (2.11) определяют j2 и j3
 |
(2.12)
 |
(2.13)
Из треугольника ВСD опред. Угол g
 =>
=> ![]() =119.049821+
=119.049821+
![]() (2.14)
(2.14)
По теореме косинусов из треуг. BCD опред. l4
![]() =0.32796148
=0.32796148
В соответствии с рисунком (2.2) записывают уравнение змкнутости второго векторного контура OCDO
![]() (2.15)
(2.15)
Уравнение (2.15) записывают в проекциях на оси координат
 |
Из системы уравнений (2.15) определяют j8 и l8
 (2.16)
(2.16)
 (2.17)
(2.17)
В соответствии с рисунком (2.2) записывают уравнение змкнутости третьего векторного контура ODFO:
В проекциях на оси координат:
(2.15.1)
Из системы уравнений 2.15 и 2.19 находим j5

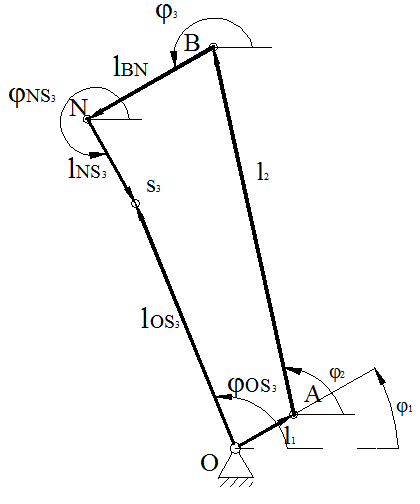
Определение положений центров масс эвеньев
Первый векторный контур:
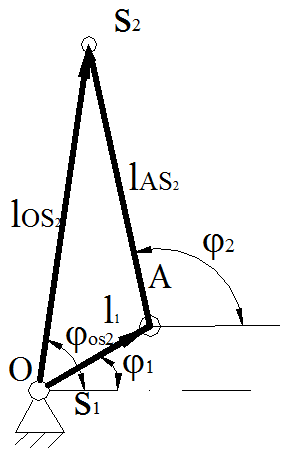 |
Рисунок 2.3 - Построение замкнутых векторных контуров
В соответствии с рисунком (2.3) записывают уравнение замкнутости первого векторного контура 0АS2
(2.18)
Из уравнения (2.18) определяют координаты центра массы второго звена
 (2.19)
(2.19)
Второй векторный контур
 |
 |
Из уравнения определяют координаты центра масс третьего звена:
 |
Третий векторный контур:
 |
Уравнение замкнутости третьего векторного контура:
 |
Координаты центра масс четвёртого звена:
 |
Координаты центра масс пятого звена:
Таблица 2.1 - Результаты расчета положений звеньев
|
j1 |
j7 |
l7 |
j2 |
j3 |
j4 |
j5 |
S2x |
S2y |
S3x |
S3y |
S4x |
S4y |
|
0 |
162,46662 |
0,39735 |
101,11704 |
205,50967 |
324,55949 |
80,8978 |
0,0284 |
#ЗНАЧ! |
-0,0705 |
0,163253 |
-0,03085 |
0,12208 |
|
30 |
165,72370 |
0,38405 |
102,32307 |
209,78735 |
328,83718 |
82,8924 |
0,0194 |
0,109419 |
-0,0744 |
0,182409 |
-0,02413 |
0,1435 |
|
60 |
167,81678 |
0,36205 |
101,01909 |
213,44938 |
332,49920 |
84,4101 |
0,00359 |
0,134935 |
-0,0789 |
0,198535 |
-0,01899 |
0,16234 |
|
90 |
168,03354 |
0,33620 |
97,20558 |
215,31032 |
334,36014 |
85,113 |
-0,014 |
0,154417 |
-0,0816 |
0,20661 |
-0,01661 |
0,17208 |
|
120 |
165,88700 |
0,31335 |
91,41902 |
214,42319 |
333,47302 |
84,7837 |
-0,0278 |
0,161966 |
-0,0803 |
0,202771 |
-0,01773 |
0,16743 |
|
150 |
161,65357 |
0,30088 |
85,15260 |
210,79186 |
329,84168 |
83,3263 |
-0,0338 |
0,154901 |
-0,0756 |
0,186861 |
-0,02266 |
0,14862 |
|
180 |
156,76988 |
0,30350 |
80,69833 |
205,78728 |
324,83710 |
81,0344 |
-0,0319 |
0,135527 |
-0,0707 |
0,164505 |
-0,03039 |
0,12345 |
|
210 |
153,12898 |
0,32016 |
79,75616 |
201,31012 |
320,35994 |
78,7118 |
-0,0234 |
0,110215 |
-0,068 |
0,144211 |
-0,03817 |
0,10171 |
|
240 |
151,79083 |
0,34485 |
82,31979 |
198,54200 |
317,59182 |
77,1495 |
-0,01 |
0,085995 |
-0,0671 |
0,13158 |
-0,04337 |
0,08864 |
|
270 |
152,70646 |
0,37010 |
87,15303 |
197,78279 |
316,83261 |
76,7043 |
0,00556 |
0,06856 |
-0,0669 |
0,12811 |
-0,04485 |
0,08511 |
|
300 |
155,26847 |
0,38963 |
92,72743 |
198,91081 |
317,96063 |
77,3632 |
0,01967 |
0,061873 |
-0,0672 |
0,133265 |
-0,04266 |
0,09037 |
|
330 |
158,75417 |
0,39933 |
97,71068 |
201,64047 |
320,69029 |
78,8919 |
0,02827 |
0,067686 |
-0,0681 |
0,145715 |
-0,03757 |
0,10329 |
|
360 |
162,46662 |
0,39735 |
101,11704 |
205,50967 |
324,55949 |
80,8978 |
0,0284 |
0,084898 |
-0,0705 |
0,163253 |
-0,03085 |
0,12208 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.