2.3 Исследование механизма графическим методом
2.3.1 Определение аналогов скоростей
Скорость точки А VА, м/с, вычисляют по формуле
(2.37)
w1=1, с-1;
lOA=0.05, м.
Масштабный коэффициент скоростей mV, м/с/мм, вычисляют по формуле
 |
(2.38)
где PVA - отрезок изображающий вектор скорости точки А, мм;
PA=50.
Записывают векторное уравнение для нахождения скорости точки В
![]()
![]() (для звена
2) (2.39)
(для звена
2) (2.39)
(для звена 3 Vc=0)
Тогда:
![]()
Скорость точки D:
![]()
![]()
(Vc=0)
![]()
Скорость точки
F:
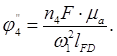
Уравнения (2.39) и (2.40) решают графически.
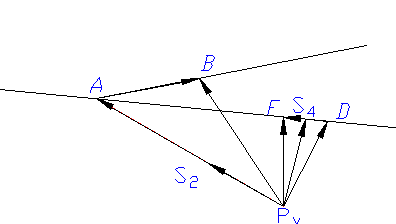 |
Рисунок 2.4 - План скоростей
Положение точек S2 и S4 определяют по формулам
(2.41)
(2.42)
Из плана скоростей определяют аналоги линейных и угловых скоростей

 (2.43)
(2.43)
 |
 |
(2.44)
 |
|||
 |
|||
Значения аналогов скоростей, полученные графическим и аналитическим методами, сводят в таблицу 2.4.
Таблица 2.4 - Результаты расчета аналогов скоростей
|
Величина |
j¢2 |
j¢3 |
j¢5 |
S'2x, м |
S'2y, м |
S'3y, м |
S'3y, м |
S'4x, м |
S'4y, м |
S'5y, м |
|
Из плана скорос тей |
0.0863 |
0.0986 |
0.0384 |
-0,0338 |
0,0268 |
-0,007 |
0,0246 |
0,0075 |
0,0457 |
0,0301 |
|
Анали тически |
0.0863 |
0.0986 |
0.0384 |
-0,0338 |
0,0268 |
-0,007 |
0,0246 |
0,0075 |
0,0457 |
0,0301 |
|
D% |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
2.3.2 Определение аналогов ускорений
Ускорение точки А aA, м/с2, вычисляют по формуле
(2.47)
lOA=0.05, м;
![]() w1=1, рад/с.
w1=1, рад/с.
Масштабный коэффициент ускорений mа, м/с2/мм, вычисляют по формуле
 |
(2.48)
где pA - отрезок изображающий вектор ускорения точки А, мм;
 pA=50.
pA=50.
Записывают векторное уравнение для нахождения ускорения точки B
(2.49)
(2.50)
![]()
![]() lAB=0.28, м;
lAB=0.28, м;
w2=0.0863, рад/с.
![]()
![]() lBC=0.36, м;
lBC=0.36, м;
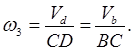
w3=0.0986, рад/с. (2.51
Записывают векторное уравнение для нахождения ускорения точки D
(2.52)
![]()
![]() (2.53)
(2.53)
lBD=0.35, м;
w3=0.0986, рад/с.
![]()
![]() lDC=0.35, м;
lDC=0.35, м;
w3=0.0986, рад/с.
Записывают векторное уравнение для нахождения ускорения точки F
![]()
![]() lDF=0.39, м;
lDF=0.39, м;
w5=0.0384, рад/с.
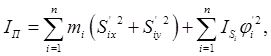
Уравнение (2.49) и (2.52) решают графически
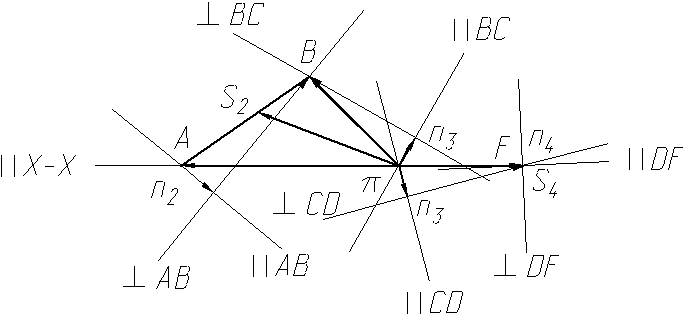 |
Рисунок 2.5 - План ускорений
Положение точек S2 и S4 определяют по формулам (2.41) и (2.42).
Из плана скоростей определяют аналоги линейных и угловых ускорений
 (2.54)
(2.54)
 |
|||
 |
|||
(2.55)
 |
|||
 |
|||
(2.56)
 |
![]() (2.57)
(2.57)
Значения аналогов ускорений, полученные графическим и аналитическим методами, сводят в таблицу 2.5.
Таблица 2.5 - Результаты расчета аналогов ускорений
|
Величина |
j''3 |
j''2 |
j''5 |
L''9 |
S''2x |
S''2y |
S''3x |
S''3y |
S''4x |
S''4y |
S''5y |
|
Из плана ускорений |
0,0277 |
-0,1417 |
-0,0008 |
0,0090 |
-0,0343 |
0,0024 |
-0,0063 |
0,0063 |
-0,00001 |
0,0102 |
0,0092 |
|
Анали тически |
0,0277 |
-0,1417 |
-0,0008 |
0,0090 |
-0,0343 |
0,0024 |
-0,0063 |
0,0063 |
-0,00001 |
0,0102 |
0,0092 |
|
D% |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
![]()
Аналогично проводят расчет кинематических параметров в остальных положениях механизма.
3 Динамическое исследование машины и расчет маховика
3.1 Определение параметров динамической модели
3.1.1 Нахождение приведенного момента инерции и его производной
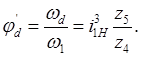
Приведенный момент инерции IП, кгĦм2, в соответствии с () вычисляют по формуле
 |
(3.1)
где n - число подвижных звеньев;
mi - масса i-ого звена, кг;
S'ix, S'iy - проекции на оси координат аналога скорости центра масс i-ого звена, м;
ISi - момент инерции i-ого звена, кгĦм2;
j'i- аналог угловой скорости i-ого звена.
Для рассматриваемого механизма формула (3.1) примет вид
![]() (3.2)
(3.2)
где j¢d - аналог угловой скорости ротора двигателя, м.
 |
(3.3)
 |
Производную приведенного момента инерции dIП/dj1, кгĦм2, определяют по формуле
 |
(3.4)
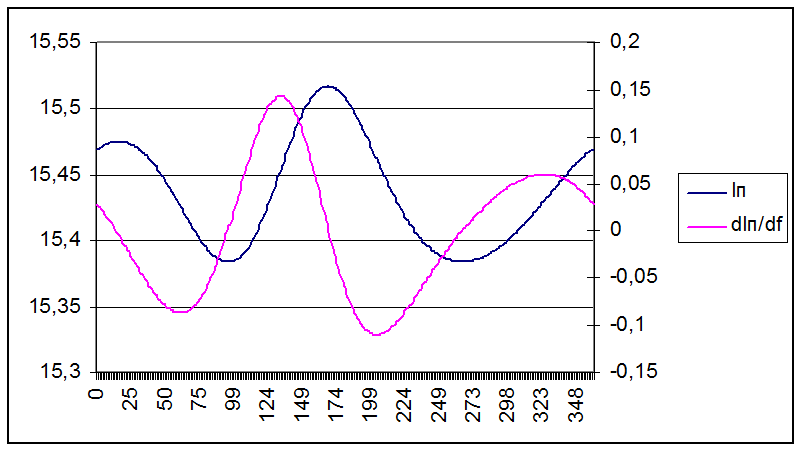
Значения приведенного момента инерции и его производной заносят в таблицу 3.1
Рисунок 3.1 - Диаграмма изменения приведенного момента инерции и его производной
 |
3.1.2 Нахождение приведенного момента сил сопротивления
Приведенный момент сил сопротивления Мпс, НĦм, в соответствии с () вычисляют по формуле
 |
(3.5)
где n - общее число подвижных звеньев;
m - число сил действующих на i-е звено;
q - число моментов действующих на i-е звено;
Fix, Fiy - проекции силы на соответствующие оси координат, Н;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.