2.2.2 Определение аналогов скоростей
Для аналитического определения аналогов скоростей дифференцируют уравнения (2.5) (2.11), (2,15) и (2,15,1) по обобщенной координате
 |
(2.22)
 |
(2.23)
Из системы уравнений (2.22) определяют j2¢ и j3¢
 |
(2.24)
 |
(2.25)
Из уравнения (2.14) определяют j4¢ :
 |
Для определения
![]() и
и ![]() состовляют
дополнительный замкнутый контур OCDFO
состовляют
дополнительный замкнутый контур OCDFO
(2.26)
Проецируют на оси координат и дефференцируют:
 (2.27)
(2.27)
Из (2.27) определяют ![]() и
и ![]()
 |
|||
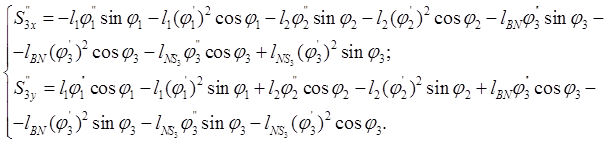
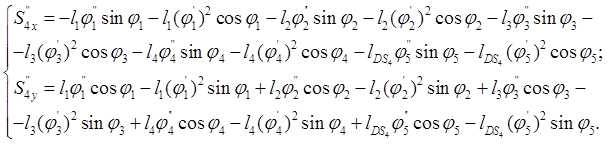
Для аналитического определения аналогов скоростей центров масс дифференцируют системы уравнений (2.19) (2.20) и (2.21) по обобщенной координате
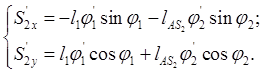 |
(2.28)
 |
(2.29)
 (2.30)
(2.30)
![]() (2.31)
(2.31)
Результаты расчетов аналогов скоростей сводят в таблицу 2.2.
Таблица 2.2 - Результаты расчета аналогов скоростей
|
j'3 |
j'2 |
j'4 |
j'5 |
L'9 |
S'2x |
S'2y |
S'3x |
S'3y |
S'4x |
S'4y |
S'5y |
|
0,1407 |
0,0794 |
0,1407 |
0,0695 |
0,0419 |
-0,0087 |
0,0483 |
-0,0061 |
0,0364 |
0,0134 |
0,0599 |
0,0419 |
|
0,1387 |
-0,0007 |
0,1387 |
0,0608 |
0,0419 |
-0,0249 |
0,0433 |
-0,0087 |
0,0353 |
0,0118 |
0,0621 |
0,0419 |
|
0,0986 |
-0,0864 |
0,0986 |
0,0385 |
0,0301 |
-0,0338 |
0,0268 |
-0,0078 |
0,0246 |
0,0075 |
0,0457 |
0,0301 |
|
0,0197 |
-0,1652 |
0,0197 |
0,0072 |
0,0061 |
-0,0316 |
0,0023 |
-0,0017 |
0,0049 |
0,0014 |
0,0093 |
0,0061 |
|
-0,0792 |
-0,2123 |
-0,0792 |
-0,0299 |
-0,0243 |
-0,0195 |
-0,0244 |
0,0066 |
-0,0197 |
-0,0058 |
-0,0371 |
-0,0243 |
|
-0,1547 |
-0,1918 |
-0,1547 |
-0,0658 |
-0,0468 |
-0,0036 |
-0,0451 |
0,0104 |
-0,0392 |
-0,0127 |
-0,0699 |
-0,0468 |
|
-0,1675 |
-0,0949 |
-0,1675 |
-0,0821 |
-0,0499 |
0,0105 |
-0,0517 |
0,0075 |
-0,0433 |
-0,0158 |
-0,0716 |
-0,0499 |
|
-0,1244 |
0,0317 |
-0,1244 |
-0,0681 |
-0,0366 |
0,0215 |
-0,0427 |
0,0030 |
-0,0325 |
-0,0130 |
-0,0501 |
-0,0366 |
|
-0,0588 |
0,1318 |
-0,0588 |
-0,0342 |
-0,0172 |
0,0287 |
-0,0230 |
0,0007 |
-0,0154 |
-0,0065 |
-0,0227 |
-0,0172 |
|
0,0074 |
0,1817 |
0,0074 |
0,0044 |
0,0022 |
0,0297 |
0,0010 |
-0,0001 |
0,0019 |
0,0008 |
0,0028 |
0,0022 |
|
0,0663 |
0,1825 |
0,0663 |
0,0382 |
0,0194 |
0,0229 |
0,0240 |
-0,0009 |
0,0173 |
0,0073 |
0,0257 |
0,0194 |
|
0,1132 |
0,1443 |
0,1132 |
0,0615 |
0,0333 |
0,0090 |
0,0411 |
-0,0029 |
0,0295 |
0,0118 |
0,0458 |
0,0333 |
|
0,1407 |
0,0794 |
0,1407 |
0,0695 |
0,0419 |
-0,0087 |
0,0483 |
-0,0061 |
0,0364 |
0,0134 |
0,0599 |
0,0419 |
2.2.3 Определение аналогов ускорений
Для аналитического определения аналогов ускорений звена 2 и 3 дифференцируют систему уравнений (2.22)
 |
|||
 (2.34)
(2.34)
![]() (2.35)
(2.35)
 |
(2.36)
 |
|||
 |
|||
Таблица 2.3 - Результаты расчета аналогов ускорений
|
j''3 |
j''2 |
j''5 |
L''9 |
S''2x |
S''2y |
S''3x |
S''3y |
S''4x |
S''4y |
S''5y |
|
0,0277 |
-0,1417 |
-0,0008 |
0,0090 |
-0,0343 |
0,0024 |
-0,0063 |
0,0063 |
-0,00001 |
0,0102 |
0,0092 |
|
-0,0382 |
-0,1613 |
-0,0311 |
-0,0209 |
-0,0257 |
-0,0211 |
-0,0025 |
-0,0109 |
-0,0059 |
-0,0089 |
-0,0104 |
|
-0,1156 |
-0,1624 |
-0,0525 |
-0,0531 |
-0,0070 |
-0,0406 |
0,0067 |
-0,0297 |
-0,0102 |
-0,0334 |
-0,0347 |
|
-0,1801 |
-0,1310 |
-0,0661 |
-0,0789 |
0,0149 |
-0,0512 |
0,0156 |
-0,0446 |
-0,0128 |
-0,0543 |
-0,0554 |
|
-0,1832 |
-0,0361 |
-0,0739 |
-0,0819 |
0,0292 |
-0,0482 |
0,0137 |
-0,0460 |
-0,0143 |
-0,0543 |
-0,0558 |
|
-0,0907 |
0,1187 |
-0,0566 |
-0,0454 |
0,0297 |
-0,0280 |
0,0000 |
-0,0246 |
-0,0109 |
-0,0239 |
-0,0260 |
|
0,0386 |
0,2343 |
-0,0017 |
0,0124 |
0,0239 |
0,0032 |
-0,0090 |
0,0087 |
-0,0001 |
0,0143 |
0,0129 |
|
0,1139 |
0,2299 |
0,0512 |
0,0498 |
0,0179 |
0,0295 |
-0,0068 |
0,0293 |
0,0100 |
0,0331 |
0,0341 |
|
0,1299 |
0,1456 |
0,0731 |
0,0596 |
0,0086 |
0,0436 |
-0,0024 |
0,0340 |
0,0139 |
0,0352 |
0,0381 |
|
0,1208 |
0,0459 |
0,0714 |
0,0560 |
-0,0053 |
0,0466 |
-0,0010 |
0,0316 |
0,0135 |
0,0321 |
0,0353 |
|
0,1029 |
-0,0395 |
0,0562 |
0,0469 |
-0,0204 |
0,0398 |
-0,0025 |
0,0269 |
0,0108 |
0,0281 |
0,0303 |
|
0,0740 |
-0,1024 |
0,0310 |
0,0318 |
-0,0316 |
0,0242 |
-0,0053 |
0,0190 |
0,0061 |
0,0219 |
0,0223 |
|
0,0277 |
-0,1417 |
-0,0008 |
0,0090 |
-0,0343 |
0,0024 |
-0,0063 |
0,0063 |
0,0000 |
0,0102 |
0,0092 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.