При последовательном присоединении групп Ассура необходимо руководствоваться определенными правилами. При образовании механизма с одной степенью подвижности первая группа присоединяется свободными элементами звеньев к ведущему звену и стойке. Последующие группы могут присоединяться к любым звеньям полученного механизма только так, чтобы звенья группы обладали относительной подвижностью.
1.2.5.2 Структурная классификация плоских механизмов.
Механизм, состоящий из ведущего звена и стойки (образуют кинематическую пару пятого класса), условно назвали механизмом 1 класса (рис. 1.2.1, а).
Из соотношения (1.2.3) следует, сто условие, которому должны удовлетворять группы Ассура в состав которого входят только пары пятого класса, можно записать так:
3n-2 p5 ,
откуда p5=![]() n
(1.2.4)
n
(1.2.4)
Так как числа звеньев кинематических пар могут быть только целыми, то условия (1.2.4) удовлетворяют только следующие сочетания чисел звеньев и кинематических пар, входящих в группу (табл. 1.2.1)
Таблица 1.2.1
|
№ п/п |
1 |
2 |
3 |
4 |
· |
|
n |
2 |
4 |
6 |
· |
· |
|
p5 |
3 |
6 |
9 |
· |
· |
Задаваясь различными сочетаниями этих чисел можно получить группы Ассура различного вида, которые разбиваются на классы.
Простейшим сочетанием чисел звеньев и пар будет n=2 и p5=3. При этом сочетании можно образовать всего пять групп Ассура, две из которых являются основными (рис.1.2.2,б,в), а три другие – производные от них (схемы их в методическом указании не приводятся).
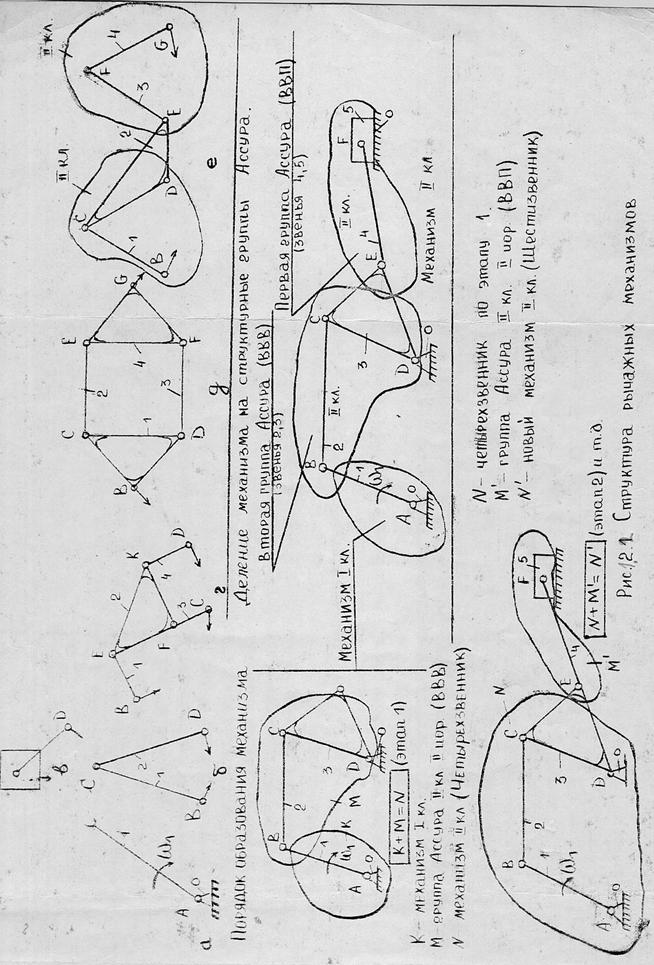
Группа, имеющая два звена и три пары пятого класса, называется группой второго класса или двухпововодковой группой, ибо присоединение этой группы к основному механизму производится двумя поводками В и Д.
Механизмы, в состав которых входят группы Ассура класса не выше второго, называются механизмами второго класса.
Большинство современных механизмов, применяемых в технике, принадлежат к механизмам второго класса.
Следующая по числу звеньев группа Ассура должна содержать четыре звена и шесть пар пятого класса. Для этого сочетания могут быть получены три типа цепей, структурные принципы образования которых различны. Первая кинематическая цепь показана на рис. 2.1. г, представляет собой сложную незамкнутую цепь, являющуюся группой Ассура третьего класса третьего порядка и называется трехповодковой группой. Присоединение ее к механизму производится посредством трех поводков В, С, Д. Отличительной особенностью этой группы является звено EFK, входящее в три кинематические пары и образующее некоторый жесткий треугольный замкнутый контур, получившее название базисного звена.
Механизмы, в состав которых входят группы не выше групп третьего класса третьего порядка, называется механизмами третьего класса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.