3. Определить траекторию движения точки С (x-x).
4. Раствором циркуля В0С0 засекают точку С0 на траектории x-x.
5.
Соединив
найденные точки В0 и С0 и вычертив схематично ползун,
получают положение механизма для заданного значения ![]()
Ряд последовательных положений механизма,
соответствующих различным значениям ![]()
Линии, соединяющие на плане последовательные положения одноименных точек (например, точки Е рис. 1.3.1, а) называют траекторией движения этих точек.
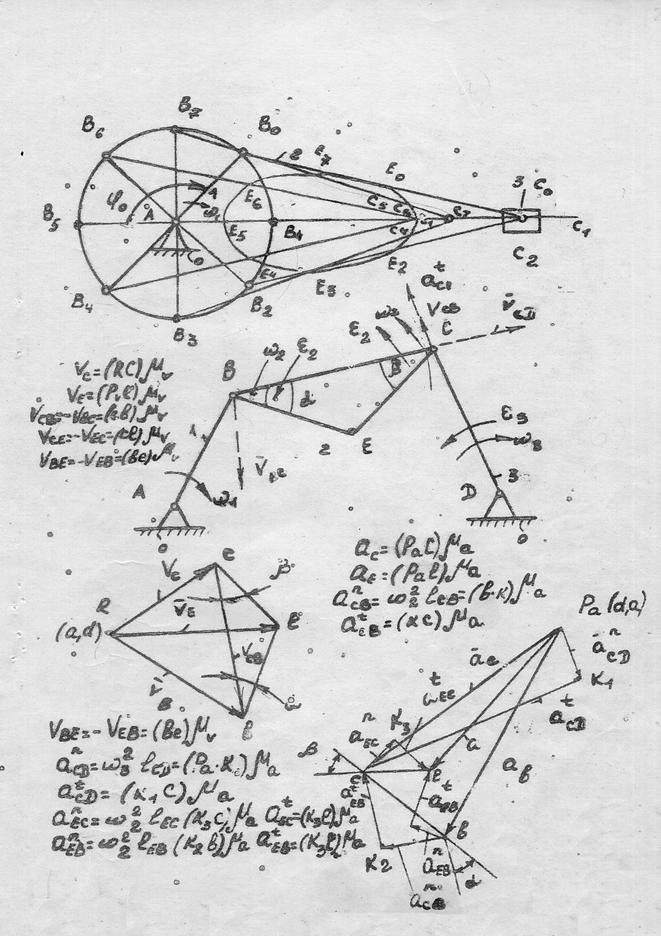
Рис. 1.3.1
1.3.3. Определение скоростей точек и звеньев механизма.
Скорости точек и звеньев механизма определяют по известным правилам теоретической механики в зависимости от характера движения звеньев.
При поступательном движении звена скорости всех точек его будут равны и направлены в одну сторону, т.е.:
![]() ;
; ![]()
При вращении звена вокруг неподвижного центра скорости точек его связаны зависимостью
u=![]()
где ![]() - угловая скорость звена,
р/с;
- угловая скорость звена,
р/с;
n - частота вращения звена;
R - радиус вращения, м, u^R и направлен в сторону мгновенного движения звена.
Если звено совершает плоскопараллельное движение, то линейная скорость любой его точки (например, точки В) выражается уравнением
uВ=uпер+uотн=uпер+![]() R
R
Где uпер, uотн - соответственно векторы переносной и относительной скорости точек рассматриваемого звена. uотн перпендикулярен R и направлен в сторону мгновенного вращения звена.
Рассмотрим методику решения задач по определению скоростей точек и звеньев механизма на примере шарнирного четырехзвенника. Исходными данными для решения настоящей задачи являются:
1. План положения механизма (рис. 1.3.1, б);
2. Геометрические параметры механизма;
3. Частота вращения ведущего звена (n1).
Точка В механизма принадлежит звену 1 и вращается вокруг неподвижной точки А, следовательно, с учетом уравнения (1.3.1):
uB=![]() , uB^
, uB^![]()
Рассматривая точку С по отношению точек В и Д, с учетом характера движения звеньев 2 и 3, в соответствие уравнением (3.2), запишем:

Из анализа равенства (1.3.3) видно, что оно решается только графически путем построения плана скоростей.
Для построения последнего выбирают кинематический масштаб скорости
![]()

где uист - абсолютное значение скорости, м/с;
![]() -
длина вектора абсолютной скорости на чертеже, мм.
-
длина вектора абсолютной скорости на чертеже, мм.
Масштаб скорости подчиняется требованиям ГОСТ 2.302-68.
Для построения плана скоростей по равенству (1.3.3) берут произвольную
точку Pu (полюс
плана скоростей) и строят векторы скоростей, входящих в равенство с учетом их
направления. Точка пересечения известных по направления векторов равенства
(1.3.3) определяет конец вектора скорости искомой точки С (рис. 3.1, в).
Вектор Pu C-вектор
скорости точки С в масштабе ![]() , следовательно:
, следовательно:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.