Мн внаем зависимость между частотой fиоременпого тока, чж<у
жш пар полюсов п и синхронной скоростью N (чнелом- оборотов в секунду):
СВОЙСТВА СИНХРОННЫХ ЭЛЕЕТРОДВШ'АТШШЙ МЯ
откуда: : *" * , ■ • ,
, ' : ' ' f ' •
■N—■■*- оборотов в секунду. ' {
По этой формуле» можно нг.йтп скорость синхронного давгатёля np'ts любим числе полюсов и при заданной частоте переменного тока»
Пример' 91» ИаГгга скорость двадцатичетырехзтагоавдо синхронного двигателя при частоте, равной 25 периодам в секуяду.
Решение. Даш»: gp = 24 я /= 25, и лотаму число пар Колосов j> s= 12 ,» скорорть силхронаого двнгатедя будог равпа
■ЛГ==у|==2-рОборота в секунду, '
алй ' ■
1 2 ?5 X 60 = 125 оборотов в мтауту,
Пример Ш. Сшгерошши двигатель, включегпйЗ в цепь перометгасто тока с частотой, равной 50, работает со ciiopocvao 200 оборотов в мкиуху. О ' ПО.1ЮС0В этого же двигателя.
Режвяив. Дапо: f—5Q и iY=.-^g-=3=3~оборота в секунду.
Если нзвестна Еависимо.сть по формуле

Вторая характерная особенность синхронного дзэтатечя состоит в том, что кроме переменного тока, питающего обметку якоря этого двигателя, необходимо еще иметь п посхояпкий. ток, который должен про-ходить в цопп обмотки нндукторя? т. е. в цепи возбуждения этого двигателя.
В тех установках, которые .обеду-ядваготся электрической станцией, вырабатывающей только переменный той, приходятся ставить "специальные преобразователи для получения «постоянного тока, необходимого для возбуждения синхронных1 двигателей.
Наконец, третьей .характерной особенностью синхронных двигать лей является трудность их куска в ход. для чего нужно сначала развернуть ротор двигателя до скорости, отвечающей синхронизму, е только после того, как будет достигнуто полное совпадение фаз. можно включить рубильники в день якоря еяпхроязоге Двигателя. Отсюда' ясно, что для пуска синхронного двигателя в ход ауяшо пользоваться. фазными ламиажи или друицш синхронизаторамк.
Синхронные двигатели, подобно альтернаторам, могут быть построены с вращающимся якорем или с вращающимся индуктором (электромагнитами); последний тид имеет наибольшее распространение, а первый
|
|
тип можно встретить только в двигателях небольшой мощности.
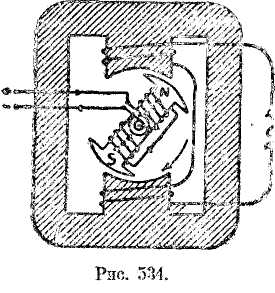
Для того чтобы показать, потому син-^ ровный двигатель вращается с синхронной скоростью и требует разворачивания мотора для пуска его в ход, представим себе статор небольшого синхронного дви-1ателя в виде двухполюсного электромагнита (рис. 534), по обмотке которого проходит переменный синусоидальный ток. Допустим, что ротором этого двигателя служит двухполюсный электромагнит, обмотка которого питается постоянный током. Так как ротор вращается, то на его валу укрепляют два контактных кольца,
изолированных друг от друга и от корпуса, к которым прижимаются две неподвижных щетки, соединенных с -f- и — генератора постоянного тока. Обмотка ротора питается постоянным током, а потому его полюсы свою полярность N и S. Что же касается полюсов статора,
то полярность их будет непрерывно меняться в соответствии с направлением тока, протекающего в данный момент по обмотке статора.
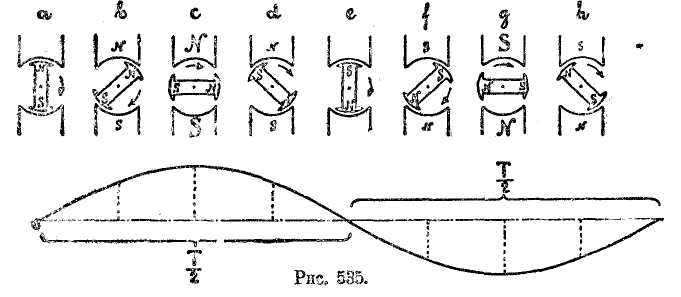
Допустим, что ротор такого двигателя вращается с синхронной скоростью, л па рис. 535 наказаны разнно положения ротора нашего двухполюсного двигателя, * которые он занимает в точение одного периода.
1 На рас. 535 обмотки статора п ротора по показаны, а вместо них помечены полюсы статора ж ротора в раеслштрзваеиые моменты времени. Большие йуквы N и &' отвечайг полному ианагцачипчкпю статора, когда тог., проходящий но его ошютке, достигает наибольшею зиа^еипя.
Ни том же рисунке внизу изображена сипусонда, период которой раздолен на 8 частей, соответствующих 8 моментам положения ротора но отношению к статору. Из рассмотрения этого рисунка но трудно вплоть, что ротор вращается вследствие взаимодействия полюсов ста-тира и ротора, так как в положениях Ь, о, d, /, д и hсеверны! полюс ротора отталкивается от северного полюса статора и прятякпаегся к ого южному полюсу. Положения ротора, отмеченные на рис. : .;.' ^лквами а ц е, отвечают мертвим мочкам, так как в эт<н кочмгг "■'.ил тока в обмотке статора равна нулю. Однако, ротор облиг<г.-л" инерцией, и эти мертвые точки он будет свободно проходить <v} За-дерЖЕИ.,:,
На рис. 536 ротор вращается по часовой стрелке, но по трудно понять, что с таким же успехом ротор может вращаться и в обратную сторону. Другими словами, ротор у однофазного синхронного двигателя вращается в ту сторону, в которую его развернули при иуско в ход.
Без разворачивания ротор не может начать вращаться, и это вполне понятно; полюсы статора меняют свою полярность чрезвычайно быстро (50 раз в секунду), и если в какой-нибудь момент ротор оказался бы в выгодном для себя положении в смысле вращения, то, благодаря своей инерции, он не может сразу развить синхронную скорость, а в следующий момент он получит толчок уже в обратную сторону; в результате ротор будет стоять на месте.
Если же синхронному двигателю дать возбуждение и развернуть рукой или каким-нибудь двигателем до синхронной скорости, а затем замкнуть рубильники в цепи его якоря, то ротор будет продолжать работать с синхронной скоростью. При этом двигатель будет работать без нагрузки (на холостой ход), и поглощаемая им из цепи электрическая мощность будет как раз равна мощности, затрачиваемой на преодоление его вредных сопротивлений (потерн ва трение, потери от токов Фуко, гистерезиса и электрические потери). Эта мощность, конечно, будет невелика. Если же теперь нагружать синхронный двигатель, т. е. заставить его совершать какую-нибудь механическую работу, то ротор этого двигателя на мгновение задержится, но в дальнейшем будет продолжать вращаться с синхронной скоростью; при этом полюсы ротора займут такое положенно относительно обмотки или полюсов статора, при котором двигатель будет поглощать из сети такую эл'чггрическую мощность, которая необходима для преодоления дан по 3 нагрузки,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.