1. Отрезки, изображающие
перемещение ![]() , откладывают на новой диаграмме (рис. 11.2, г) либо их
переносят с диаграммы S = S(
, откладывают на новой диаграмме (рис. 11.2, г) либо их
переносят с диаграммы S = S(![]() ) (рис. 11.2, в).
) (рис. 11.2, в).
2. Для
каждого положения точки B (для каждого значения S) находят
длину вектора vqB и
откладывают его перпендикулярно перемещению S. Условно
для положительного направления вектора vqB принята
фаза удаления при вращении кулачка по часовой стрелке. Соответственно в фазе
сближения вектор vqB — отрицательный.
Аналоги скоростей, изображаемые на разных диаграммах, имеют разные масштабы.
Для их согласования отрезки ![]() в мм,
взятые из диаграммы vqB = vqB(φ), умножают на отношение масштабов. Таким образом,
отрезок, изображающий вектор vqB на диаграмме vqB = vqB(S), равен:
в мм,
взятые из диаграммы vqB = vqB(φ), умножают на отношение масштабов. Таким образом,
отрезок, изображающий вектор vqB на диаграмме vqB = vqB(S), равен:
![]() . (11.12)
. (11.12)
Из концов векторов vqB должны проводиться лучи под углами передачи m, которые в соответствии с правилом центра вращения кулачка проходят через центр его вращения. В начале проектирования эти углы неизвестны, но их минимальные значения определяют через допускаемые углы давления
![]() .
(11.13)
.
(11.13)
3) Для
нахождения положения центра вращения кулачка концы векторов vqB объединяют
плавной кривой, образующей диаграмму vqB = vqB (S). Касательно к диаграмме
проводят лучи под углами ![]() и
и ![]() к оси
ординат (рис. 11.2, г). Точка пересечения граничных лучей является
оптимальной для положения центра вращения кулачка из условия минимальных его
размеров. Возможные положения центра вращения, для которых выполняется условие
к оси
ординат (рис. 11.2, г). Точка пересечения граничных лучей является
оптимальной для положения центра вращения кулачка из условия минимальных его
размеров. Возможные положения центра вращения, для которых выполняется условие ![]() <
<
![]() , могут
находиться между продолжениями граничных лучей ниже точки их пересечения, но
размеры механизма не будут минимальными.
, могут
находиться между продолжениями граничных лучей ниже точки их пересечения, но
размеры механизма не будут минимальными.
4) Величину
смещения e определяют кратчайшим расстоянием ![]() (рис. 11.2, г) от центра вращения
до траектории движения толкателя. Действительное смещение eопределяют делением отрезка
(рис. 11.2, г) от центра вращения
до траектории движения толкателя. Действительное смещение eопределяют делением отрезка ![]() на масштаб mS с
последующим округлением до стандартного целого числа в мм.
на масштаб mS с
последующим округлением до стандартного целого числа в мм.
5)
Начальный радиус ro определяют отрезком ![]() от центра
вращения кулачка
от центра
вращения кулачка ![]() до нижней точки перемещения толкателя
до нижней точки перемещения толкателя
![]() .
(11.14)
.
(11.14)
Начальный радиус следует округлить до стандартного значения из ряда Ra 40 по ГОСТ 6636–69: до 22 мм каждое целое значение; далее 24, 25, 26, 28, 30, 32, 34, 35, 36, 38, 40, 42, 45, 48, 50 мм.
Б. Кулачково-коромысловый механизм.
Правило центра вращения кулачка справедливо и для механизма с коромыслом. В произвольно выбранном масштабе ml строят коромысло l в крайних положениях с заданным размахом ymax (рис. 11.3).
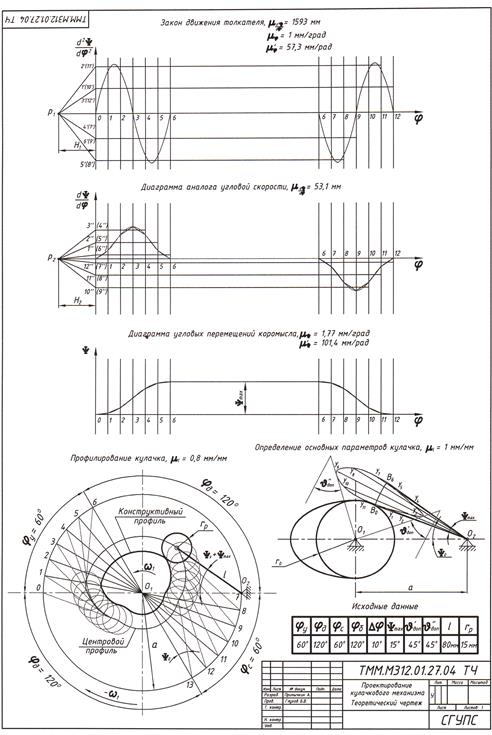
В кулачково-коромысловом механизме задан закон движения коромысла в виде аналога углового ускорения — второй производной углового перемещения по обобщенной координате. Графическим интегрированием получают диаграммы аналога угловой скорости и угла поворота коромысла. Образец листа 4 курсового проекта для иллюстрации проектирования кулачково-коромыслового механизма приведен на рис. 11.4.
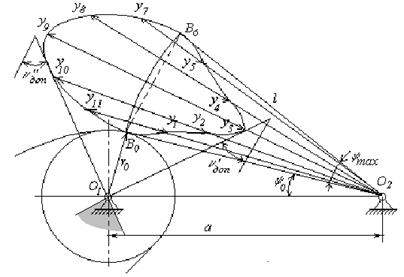
Рис. 11.3
Масштаб углового перемещения коромысла может быть выражен в мм/град или мм/рад. В первом случае
 , (11.15)
, (11.15)
во втором случае
 , (11.16)
, (11.16)
где
![]() — максимальная ордината на диаграмме ψ = ψ(φ),
мм; ymаx — максимальное заданное
угловое перемещение, град.
— максимальная ордината на диаграмме ψ = ψ(φ),
мм; ymаx — максимальное заданное
угловое перемещение, град.
Масштаб первой производной углового перемещения в мм:
 . (11.17)
. (11.17)
ВекторvqB определяют по формуле:
 . (11.18)
. (11.18)
Практически величина vqB составляет часть от длины коромысла
l, например, 0,38. Для построения
диаграммы vqB = vqB (S) в этом случае
дугу В0–В6, очерченную радиусом l(рис. 11.3), размечают,
откладывая текущие углы поворота коромысла для каждого положения кулачка в
градусах, взятые из диаграммы ψ = ψ(φ). При этом величины углов определяют делением ординаты
диаграммы ψ =
= ψ(φ) на масштаб ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.