В схемах, отличающихся от типовой, требуется ввести угол ψ между заданной схемой и типовой. Так, в механизмах трактора (рис. 2.5, а) направляющие обеих диад расположены под углом 90° по сравнению с типовой схемой (рис. 4.8). В этом случае угол между осями xи y ψ = 90° автоматически прибавляется к задаваемому начальному углу φ1 = 30° и к другим углам φ1, вводимым по циклу с шагом Δφ1 = 30°. Так, для угла φ1 = 90°, отсчитываемого от положительного направления оси x, модули скоростей и ускорений будут соответствовать типовой схеме с φ1 = 0°. Иначе говоря, при угле φ1 = 0° (положение кривошипа 3) рассчитываются параметры по формуле типовой схемы, но в колонке «положения кривошипа» на распечатке ставится положение 12 или угол 90°. Направления линейных векторов и направляющий угол шатуна φ2 также корректируется на угол ψ. Направления угловых скоростей ω2 и ускорений ε2 не изменятся в заданной схеме по сравнению с типовой.
В диаде ADE(рис. 2.5, а) кинематические параметры повторяются с интервалом 180° по сравнению с диадой ABC. В этом случае расчеты можно повторить, вводя угол между осями ψ = = 90° + 180° = 270° и получив новую распечатку. Более рационально использовать распечатку диады ABC, где колонку с номерами положений снабдить пометкой ABC, а рядом, на свободном поле распечатки создать колонку с пометкой ADE, где поместить номера положений, отличающихся на 6 в сравнении с первой колонкой ABC, например, против 1 ставить 7, против 2 ставить 8, против 10 — 4, против 12 — 6 и т.д.
В механизме тепловозного дизеля (рис. 2.6, а) расчеты по программе ТМ24 можно выполнить только для диады ABC. Угол между осями xи y определяют по формуле:
![]() , (4.42)
, (4.42)
где
![]() — угол между осями цилиндров; при
— угол между осями цилиндров; при ![]() = 60°
= 60° ![]() 120°.
120°.
В механизме воздушного компрессора (рис. 2.7, а) углы между осями цилиндров и осью x определяют по формулам:
![]() ;
;![]() .
.
При ![]() = 90°
= 90°
![]() = 45°,
= 45°, ![]() = 135°.
= 135°.
В распечатках компьютерных данных углы векторов привязаны к оси x, расположенной, как известно, горизонтально. Пример распечатки по нетиповой схеме с исходными данными по заданию 4–1 приведен на рис. 4.10.
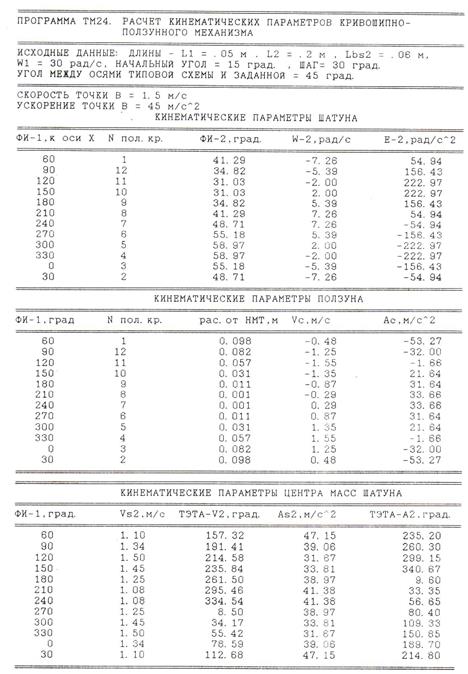
Рис. 4.10
А) Аналитические выражения
Расчетная
схема механизма представлена на рис. 4.11. Длины звеньев заменены векторами ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
Направляющие углы
.
Направляющие углы ![]() ,
, ![]() ,
, ![]() зависят от направления векторов и отсчитываются
от положительного направления оси x против
часовой стрелки при условии нахождения начала вектора в начале координат.
зависят от направления векторов и отсчитываются
от положительного направления оси x против
часовой стрелки при условии нахождения начала вектора в начале координат.
Рис. 4.11
Предварительно определяют коэффициенты длин звеньев:
![]() ;
; ![]() ;
; ![]() ;
;
![]() . (4.43)
. (4.43)
Направляющие углы определяют по формулам:
 . (4.44)
. (4.44)
 . (4.45)
. (4.45)
Для приведения вторых слагаемых уравнений (4.44) и (4.45) к виду, удобному для ввода в ЭВМ, используют выражение:
 . (4.46)
. (4.46)
Угловые скорости звеньев ω2и ω3 определяют по формулам Крамера после дифференцирования уравнений проекций векторов, связанных со звеньями, на координатные оси.
 . (4.47)
. (4.47)
 . (4.48)
. (4.48)
После их повторного дифференцирования определяют угловые ускорения:
 . (4.49)
. (4.49)
 ;
(4.50)
;
(4.50)
где
![]() ; (4.51)
; (4.51)
![]() . (4.52)
. (4.52)
Линейные скорости и ускорения точки В определяют по формулам (4.5) и (4.12). Линейные скорости точек звена 3:
![]() . (4.53)
. (4.53)
Линейные ускорения точек звена 3:
![]() . (4.54)
. (4.54)
Расчет кинематических параметров центра масс S2 шатуна ведут аналогично кривошипно-ползунному механизму по методике, изложенной в пп. 4.5.2 — формулы (4.29)…(4.38).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.