Следует помнить важное правило: для нанесения отрезка на план физическую величину умножают на масштаб. Построения начинают с нанесения на план элементов стойки: неподвижных шарниров и направляющих. Прежде всего это центр вращения кривошипа 1 — точка А (рис. 4.1).
Рис. 4.1
Радиусом АВ описывают окружность — траекторию точки В, которую делят на 12 равных частей и ставят в них шарниры, обозначая цифрами в соответствии с часовым циферблатом. Через точку А проводят горизонтальную прямую — траекторию движения ползунов.
Положения подвижных шарниров находят методом засечек. Для этого раствором циркуля ВС с ножкой в точке В проводят ряд окружностей до пересечения с другими окружностями или направляющими. В пересечении ставят шарниры.
Траекторию центра тяжести шатуна получают соединением плавной кривой точек S2, нанесенных на положения шатунов путем откладывания отрезков ВS2. Фрагмент листа 1 с планом заданного положения приведен на рис. 4.2.
План скоростей — это векторный многоугольник, изображающий величины и направления скоростей точек механизма в заданном положении начального звена. При использовании компьютерных расчетов студент строит один план скоростей и один план ускорений. При отсутствии таких расчетов студент строит по 6 или 12 планов (по указанию руководителя проекта).
Начальное звено — это звено, которому задается
обобщенная координата. Для кривошипа, совершающего полный оборот, это угол
поворота ![]() , отсчитываемый от положительного
направления оси x в направлении против часовой стрелки. Начальному
звену также задается кинематический параметр — угловая скорость w1. Так как она задана постоянной, угловое ускорение кривошипа
e1 равно нулю. Для технологических машин начальное звено — ведущее, для двигателей —
ведомое, но для определения кинематических и силовых параметров это не
принципиально. Основная цель назначения начального звена — упрощение расчетов.
, отсчитываемый от положительного
направления оси x в направлении против часовой стрелки. Начальному
звену также задается кинематический параметр — угловая скорость w1. Так как она задана постоянной, угловое ускорение кривошипа
e1 равно нулю. Для технологических машин начальное звено — ведущее, для двигателей —
ведомое, но для определения кинематических и силовых параметров это не
принципиально. Основная цель назначения начального звена — упрощение расчетов.
По Ассуру плоский
рычажный механизм может быть образован из начального механизма I класса и
присоединенных структурных групп. Так как кинематика начального звена известна
(![]() , w1, e1), то кинематический анализ диадного
механизма сводится к исследованию кинематики групп Ассура.
, w1, e1), то кинематический анализ диадного
механизма сводится к исследованию кинематики групп Ассура.
Анализ плана положений механизма ДВС (рис. 4.2) показывает, что в диаде 2–3 неизвестна кинематика средней вращательной кинематической пары C, принадлежащей одновременно звеньям 2 и 3. Таким образом, векторные уравнения теоремы о сложении скоростей составляют для внутренней кинематической пары группы Ассура. Система векторных уравнений в движении точки С относительно подвижной точкиВ, условно принятой за неподвижную, и неподвижной направляющей х–х:
 , (4.4)
, (4.4)
где vB — абсолютная скорость точки В, м/с; vCB — относительная скорость вращательного движения; vx-x — скорость направляющей; в кривошипно-нолзунном механизме vx-x = 0; vCx — относительная скорость поступательного движения.
Векторы скорости рычажного звена направлены перпендикулярно звену в сторону вращения. Модуль линейной скорости, м/с:
![]() . (4.5)
. (4.5)
Для ее
изображения на плане выбирают масштаб плана скоростей ![]() ,
мм/(м×с-1):
,
мм/(м×с-1):
 , (4.6)
, (4.6)
где pb — отрезок на плане скоростей, изображающий скорость точки В, мм.
Длину отрезка pbпринимают такой, чтобы
получился масштаб, удобный для расчетов. Так, например, при скорости vB = 4,8 м/с можно принять длину pb = 96 мм. При этом масштаб ![]() = 96/4,8 =
= 20 мм/(м×с-1). Следует помнить, что на чертежах отрезки, изображающие различные
физические величины (скорость v, м/с; ускорение a, м/с2;
силу F, Н; время t, с и т.д.),
откладывают в миллиметрах.
= 96/4,8 =
= 20 мм/(м×с-1). Следует помнить, что на чертежах отрезки, изображающие различные
физические величины (скорость v, м/с; ускорение a, м/с2;
силу F, Н; время t, с и т.д.),
откладывают в миллиметрах.
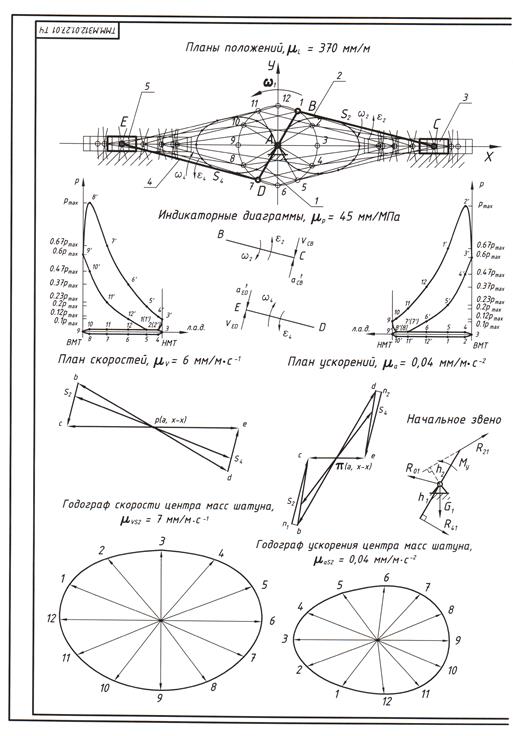
Рис. 4.2
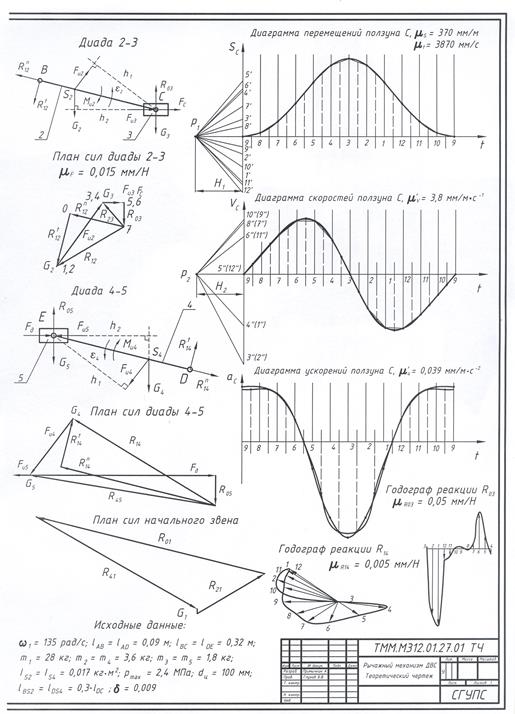
В системе векторных уравнений (4.4) vC — искомая скорость, неизвестная по величине и направлению, скорости vB и vx-x — известные (подчеркнуты двумя чертами), а относительные скорости vCB и vCx — известны только по направлению (подчеркнуты одной чертой). Пересечение их направлений дает графическое решение задачи определения искомой скорости vC. На свободном поле чертежа выбирают положение полюса плана скоростей p(рис. 4.3).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.