Б) Компьютерная программа
Кинематические параметры кривошипно-коромыслового механизма могут быть рассчитаны по программе ТМ23 в системе GWBASIC. Схема на рис. 4.6 — типовая. В заданиях на курсовой проект таких нет. Необходимо вводить угол между осями заданной схемы и типовой.
В механизме качающегося конвейера (рис. 2.10, а) следует рассчитать кинематику цепи ABCD, содержащей диаду первого вида. Направление оси типовой схемы — вдоль оси x. Ось заданной схемы — AD, она соединяет оси вращения кривошипа 2 и коромысла 3. Угол между осями xи AD:
![]() . (4.55)
. (4.55)
В механизме пресса (рис. 2.11, а) угол ψ определяют по формуле:
![]() . (4.56)
. (4.56)
В механизме подачи заготовок (рис. 2.12, а):
![]() . (4.57)
. (4.57)
В механизме стана холодной калибровки труб (рис. 2.13, а) угол между осями определяют по формуле (4.55):
![]() .
.
Угол между осями ψ обычно не совпадает с одним из заданных положений кривошипа. Для того, чтобы вычислить кинематические параметры во всех 12 положениях, вводят начальный угол φ1.0, отличный от 90°, исходя из следующего примера по исходным данным задания 7–7: x = 0,29 м, у = 0,05 м (рис. 2.10, а). Угол между осями:
![]() .
.
Ближайшее в направлении против
часовой стрелки положение кривошипа — 2 (![]() ). Для
расчета кинематики в этом положении необходимо ввести начальный угол:
). Для
расчета кинематики в этом положении необходимо ввести начальный угол:
![]() .
.
Это угол от оси заданной схемы до
ближайшего положения кривошипа. Он должен быть ![]() . В общем случае
. В общем случае
![]() , (4.58)
, (4.58)
где n = 0, 1, 2 и т.д. Например, при ![]()
![]() . Во всех случаях задают шаг
. Во всех случаях задают шаг ![]() . Пример распечатки компьютерных расчетов
по исходным данным задания 7–7 для шести положений кривошипа приведен на рис.
4.12.
. Пример распечатки компьютерных расчетов
по исходным данным задания 7–7 для шести положений кривошипа приведен на рис.
4.12.
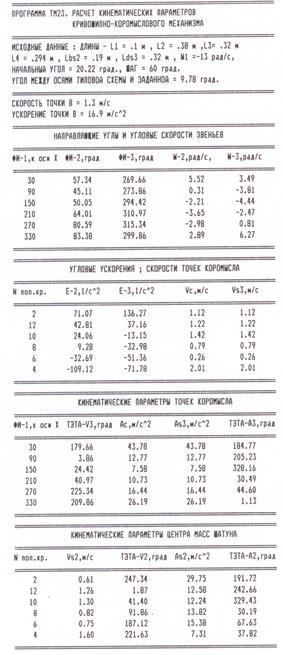
Рис. 4.12
А) Аналитические выражения
|
Рис. 4.13 |
Расчетная схема механизма
представлена на рис. 4.13. Длины звеньев заменены векторами ![]() ,
, ![]() и
и ![]() .
.
Особенностью механизма является то, что точка В принадлежит одновременно трем звеньям. Точка кривошипа В1 и точка В2 камня кулисы имеют общую ось и одинаковые кинематические параметры. Точка В3 на кулисе меняет свое положение в зависимости от координаты кривошипа. Ее кинематические параметры переменны. Координата точки В3:
![]() . (4.59)
. (4.59)
Угловая координата кулисы
![]() . (4.60)
. (4.60)
Угловая скорость кулисы
![]() . (4.61)
. (4.61)
Относительная скорость
![]() . (4.62)
. (4.62)
Кориолисово ускорение
 . (4.63)
. (4.63)
Относительное ускорение
![]() . (4.64)
. (4.64)
Угловое ускорение кулисы:
 .
(4.65)
.
(4.65)
Скорость и ускорение точки В1 определяют по формулам (4.5) и (4.12). Скорости и ускорения точек В3, D и S3 определяют по формулам, аналогичным (4.53) и (4.54):
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() .
.
Направления векторов линейных скоростей определяют в соответствии с табл. 4.1. Пример распечатки компьютерных данных по исходным данным задания 6–6 приведен на рис. 4.14.
Рис. 4.14
1. Кинематические диаграммы — наглядное графическое изображение в декартовых координатах перемещений, скоростей и ускорений точки звена, движущегося прямолинейно, в функции времени, полученных методом планов или рассчитанных аналитически.
2. Годограф — графическое изображение векторов с изменяющимися направлениями в полярных координатах.
3. Графическое дифференцирование позволяет по диаграмме перемещений получить диаграммы скоростей и ускорений.
4. Аналитические выражения для определения кинематических параметров составляют, используя метод замкнутых векторных контуров и координатный метод.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.