Установим связь интегральных вероятностей с соответствующими вероятностями в точке. При этом будем полагать:
вероятность ложной тревоги в выделенном разрешаемом объеме зоны от обзора к обзору не изменяется (помехи стационарные) ;
события обнаружения от обзора к обзору независимы;
интегрирование (накопление) отраженных импульсов осуществляется только за время облучения цели в каждом цикле обзора.
При сформулированных условиях связь![]() и с
и с ![]() определяется соотношением
определяется соотношением
|
|
(4.12)
где ![]() — вероятность обнаружения цели в
— вероятность обнаружения цели в ![]() -м цикле обзора.
-м цикле обзора.
Если вероятность обнаружения цели от обзора к обзору не изменяется (например, при малых значениях m или в случае малоскоростных целей), то
![]() (4.13)
(4.13)
Используя соотношение (4.13), можно определить требуемую вероятность правильного обнаружения в точке, если заданы интегральная вероятность правильного обнаружения и число циклов обзора:
![]() (4.14)
(4.14)
Связь![]() и
с
и
с ![]() при неизменном значении вероятности ложной тревоги от обзора к обзору по
аналогии с соотношением (4.13)
можно записать
при неизменном значении вероятности ложной тревоги от обзора к обзору по
аналогии с соотношением (4.13)
можно записать
![]() (4.15) Если
(4.15) Если ![]() то
то
![]() (4.16)
(4.16)
Проанализируем влияние числа циклов обзора на интегральную вероятность правильного обнаружения на двух конкретных примерах.
Время однократного
обзора зоны ![]() , число циклов обзора
изменяется.
, число циклов обзора
изменяется.
В этом случае для того, чтобы обеспечить неизменное значение интегральной вероятности ложной тревоги при увеличении числа циклов обзора, необходимо в соответствии с соотношением (4.16) уменьшить вероятность ложной
|
|
тревоги за обзор ![]() путем увеличения порога принятия решения. Это приведет к снижению вероятности
правильного обнаружения в каждом цикле обзора. Однако степень снижения невелика, что позволяет,
использовать соотношение (4.13) для оценки
путем увеличения порога принятия решения. Это приведет к снижению вероятности
правильного обнаружения в каждом цикле обзора. Однако степень снижения невелика, что позволяет,
использовать соотношение (4.13) для оценки ![]() .
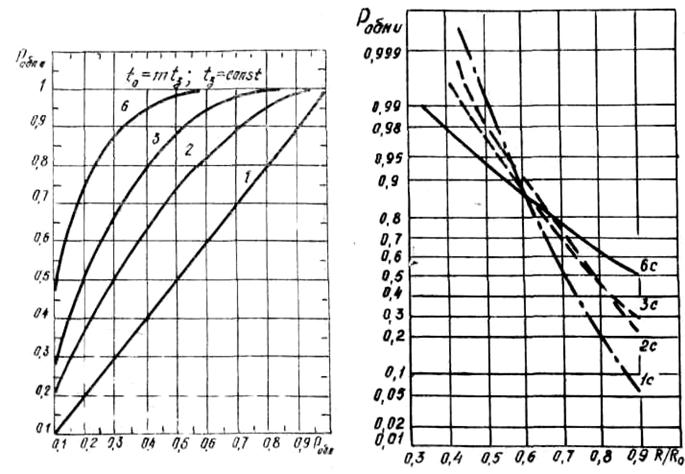
На рис. 4.2 представлены графики, рассчитанные по формуле (4.13). Из графиков видно, что при фиксированном значении
.
На рис. 4.2 представлены графики, рассчитанные по формуле (4.13). Из графиков видно, что при фиксированном значении ![]() с
увеличением числа циклов обзора интегральная вероятность правильного обнаружения увеличивается.
с
увеличением числа циклов обзора интегральная вероятность правильного обнаружения увеличивается.
Рис. 4.2. Зависимость интегральной вероятности правильного обнаружения от числа циклов обзора
Рис. 4.3. Зависимость интегральной вероятности правильного обнаружения медленно флюктуирующей цели от относительной дальности до цели при различной скорости обзора
Время,
затрачиваемое на принятие решение о наличии или отсутствии цели, фиксировано, т. е.![]()
При сформулированном условии увеличение числа циклов обзора приводит к уменьшению вероятности правильного обнаружения в каждом цикле обзора, что приводит к изменению флюктуационных потерь. Поэтому интегральная вероятность обнаружения в данном случае, зависит не только от числа циклов обзора, но и от вида цели.
На рис, 4.3 показаны зависимости
интегральной вероятности обнаружения медленно флюктуирующей цели от относительной дальности до
цели![]() . Из рисунка
видно, что при медленно флюктуирующем сигнале, отраженном от цели, достижение высокой вероятности
обнаружения
. Из рисунка
видно, что при медленно флюктуирующем сигнале, отраженном от цели, достижение высокой вероятности
обнаружения ![]() за счет повышения
за счет повышения
мощности крайне невыгодно. Более приемлемым решением является повышение скорости обзора. Однако, если требуемая вероятность не превышает 0,8—0,9, то предпочтительнее более медленный обзор зоны. Пользуясь рис. 4.3, можно
подсчитать, что при
времени однократного обзора зоны, равном 6 с, для достижения вероятности обнаружения 0,99
требуется энергия в 4,9 раза больше, чем при ![]() = 1с. Однако для
вероятности обнаружения 0,5 потребная энергия при
= 1с. Однако для
вероятности обнаружения 0,5 потребная энергия при ![]() = 6с будет в 2,4
раза меньше, чем при
= 6с будет в 2,4
раза меньше, чем при![]() = 1с.
= 1с.
4.6. ВЫБОР ЗНАЧЕНИЙ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ОБНАРУЖЕНИЯ
Вероятность![]() . При проектировании РЛС значение вероятности правильного обнаружения
выбирается с учетом последствий необнаружения цели на заданном рубеже дальности, сложности и стоимости РЛС, достоверности
сведений о статистических характеристиках эффективной поверхности целей.
. При проектировании РЛС значение вероятности правильного обнаружения
выбирается с учетом последствий необнаружения цели на заданном рубеже дальности, сложности и стоимости РЛС, достоверности
сведений о статистических характеристиках эффективной поверхности целей.
Обычно
в ТТТ вероятность обнаружения задается равной 0,5 — 0,95. С увеличением требуемого значения
вероятности обнаружения
усложняется РЛС и растет ее стоимость. Кроме того, большие вероятности обнаружения ![]() целесообразно задавать только лишь при достоверных сведениях о
статистических характеристиках
обнаруживаемой цели. В противном случае расчетное значение дальности действия РЛС может существенно отличаться от реального.
целесообразно задавать только лишь при достоверных сведениях о
статистических характеристиках
обнаруживаемой цели. В противном случае расчетное значение дальности действия РЛС может существенно отличаться от реального.
Вероятность![]() . В РЛС с визуальным съемом информации значение вероятности ложной тревоги в точке
составляет примерно
10-6. Такая вероятность ложной тревоги обеспечивается оператором при работе в нормальных
условиях. При серьезных последствиях необнаружения цели вероятность ложной тревоги целесообразно увеличивать до 10-2...10-3.
В РЛС с автоматизированным съемом
и обработкой информации значение вероятности ложной тревоги выбирается с учетом
последствий ложной тревоги и необнаружения цели, емкости памяти и быстродействия ЭВМ.
. В РЛС с визуальным съемом информации значение вероятности ложной тревоги в точке
составляет примерно
10-6. Такая вероятность ложной тревоги обеспечивается оператором при работе в нормальных
условиях. При серьезных последствиях необнаружения цели вероятность ложной тревоги целесообразно увеличивать до 10-2...10-3.
В РЛС с автоматизированным съемом
и обработкой информации значение вероятности ложной тревоги выбирается с учетом
последствий ложной тревоги и необнаружения цели, емкости памяти и быстродействия ЭВМ.
4.7. ПАРАМЕТРЫ ОБНАРУЖЕНИЯ И СВЯЗЬ МЕЖДУ НИМИ
Параметром обнаружения называется параметр, определяющий при заданном значении вероятности ложной тревоги и известной модели цели вероятность правильного обнаружения.
В теории радиолокации и при проектировании наиболее часто используют следующие параметры обнаружения:
а) отношение энергии
сигнала к спектральной плотности шума на
входе приемника РЛС (коэффициент различимости![]() ):
):
![]() (4.17)
(4.17)
б) отношение средней мощности сигнала к мощности шума на входе устройства сравнения с порогом
![]() (4.18)
(4.18)
(следует помнить, что в этом
соотношении значения ![]() и
и![]() соответствуют
значениям мощностей сигнала и шума, пересчитанным на вход детектора);
соответствуют
значениям мощностей сигнала и шума, пересчитанным на вход детектора);
в) отношение максимальной мощности сигнала к мощности шума на входе устройства сравнения с порогом
![]() (4.10)
(4.10)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.