![]() (2.50),
(2.50),
|
где |
![]() — разность
хода прямой и отраженной волн от антенны РЛС до цели.
— разность
хода прямой и отраженной волн от антенны РЛС до цели.
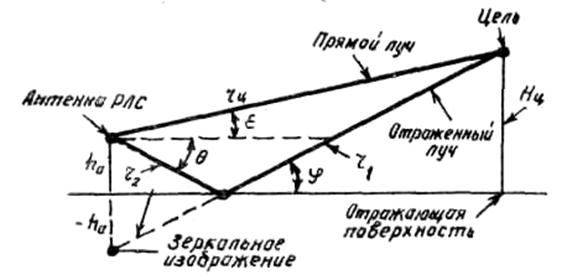
Рис. 2.4. Геометрия отражений от плоской земной поверхности
В теории радиолокации маловысотными принято называть цели, для которых выполняется условие
![]()
поэтому с учетом выражений (2.49) и (2.50)
![]() (2.51)
(2.51)
|
|
|
|
|
Разность хода |
Учитывая, что ![]() последнее выражение можно упростить:
последнее выражение можно упростить:
![]()
Из рис. 2.4 видно, что
![]()
поэтому
![]() (2.52)
(2.52)
Для нахождения
разности хода волн с учетом кривизны земной поверхности требуется решить кубическое уравнение. В
работе [6] рассмотрен метод, упрощающий вычисления.
Он предусматривает использование в формуле
(2.52) поправочного коэффициента ![]() , определяемого параметрами
, определяемого параметрами ![]() и
и ![]() :
:

где ![]() —дальность до цели, км;
—дальность до цели, км;
![]() — высота подъема
фазового центра антенны РЛС от
— высота подъема
фазового центра антенны РЛС от
носительно участка земной поверхности, принимающего
участие в формировании отраженной волны, м;
![]() — высота полета цели, м;
— высота полета цели, м;
![]() — дальность
прямой видимости, км.
— дальность
прямой видимости, км.
В зависимости
от величины параметров ![]() и
и ![]() по семейству графиков
(рис. 2.5) находится поправочный коэффициент
по семейству графиков
(рис. 2.5) находится поправочный коэффициент ![]() и
разность хода прямой и
отраженной волн определяется как
и
разность хода прямой и
отраженной волн определяется как
![]() (2.53)
(2.53)
С учетом (2.51) и (2.53) можно записать уравнение, определяющее дальность обнаружения МВЦ:
![]() (2.54)
(2.54)
Уравнение
(2.54) является трансцендентным и его можно решить либо графическим, либо итерационным методом. В
случае обнаружения цели в
условиях мешающих отражений от подстилающей
поверхности, в (2.54) вместо ![]() нужно подставлять
нужно подставлять
![]() , найденное
из уравнения (2.44).
, найденное
из уравнения (2.44).
Как следует из соотношения (2.54), зависимость дальности обнаружения МВЦ от технических параметров РЛС гораздо слабее, чем зависимость дальности обнаружения целей в свободном про-
странстве. Наиболее целесообразными способами увеличения дальности обнаружения МВЦ являются увеличение высоты подъема фазового центра антенны и переход на более короткие волны при одновременном увеличении коэффициента подавленияпассивных помех.
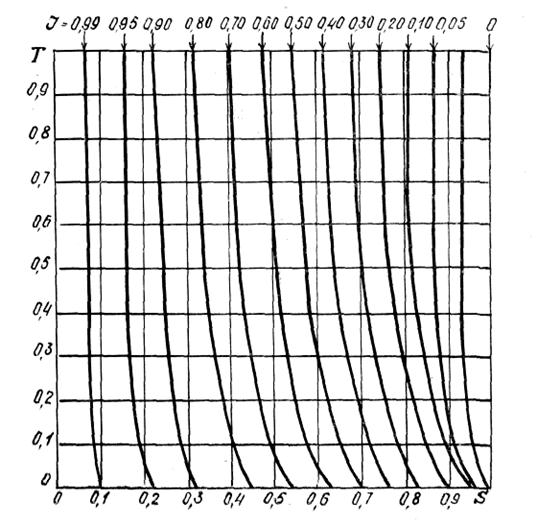
Рис. 2.5. Зависимость
поправочного коэффициента ![]() от параметров
от параметров ![]() и
и ![]()
Условия, на основании которых было получено соотношение (2.54), на практике часто не выполняются. Поэтому реальные возможности РЛС по обнаружению МВЦ должны уточняться путем ее облета на малых высотах.
2.6. УПРОЩЕННЫЕ ФОРМЫ ЗАПИСИ УРАВНЕНИЯ РАДИОЛОКАЦИИ
Если
дальность до цели выразить в километрах, а эффективную площадь приемной антенны и
эффективную поверхность цели
— в квадратных метрах, объединить числовые значения постоянных коэффициентов (имеются в виду
коэффициенты![]() 1,38•1023
Дж/К,
1,38•1023
Дж/К, ![]() = 290 К, входящие в
= 290 К, входящие в ![]() , и
, и ![]() ),
то уравнение
радиолокации в режиме обзора будет иметь вид
),
то уравнение
радиолокации в режиме обзора будет иметь вид
![]()
где 1,99 ·10![]() =
= ![]() — (коэффициент 1012 учитывает переход от дальности в метрах к
дальности в километрах).
— (коэффициент 1012 учитывает переход от дальности в метрах к
дальности в километрах).
Дальнейшее упрощение предусматривает приведение уравнения к логарифмической форме и представление величин всех, параметров в децибелах относительно единиц измерения, оговоренных выше
![]()
В каждом случае величина параметров в
децибелах вычисляется как
10![]() значения соответствующего параметра
и обозначается тем же
символом, что и раньше, но заключенным в круглые скобки. Основное достоинство логарифмической формы записи уравнения
радиолокации состоит в том, что она
позволяет получить ответ в кратчайшие
сроки при минимальной вероятности возникновения ошибок в процессе
арифметических расчетов.
значения соответствующего параметра
и обозначается тем же
символом, что и раньше, но заключенным в круглые скобки. Основное достоинство логарифмической формы записи уравнения
радиолокации состоит в том, что она
позволяет получить ответ в кратчайшие
сроки при минимальной вероятности возникновения ошибок в процессе
арифметических расчетов.
Глава 3. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ
![]() 3.1. ОБЩИЕ СВЕДЕНИЯ
3.1. ОБЩИЕ СВЕДЕНИЯ
В активной радиолокации с пассивным ответом основными характеристиками целей являются:
среднее значение эффективной
поверхности цели (ЭПЦ) ![]() плотность распределения вероятности ЭПЦ
плотность распределения вероятности ЭПЦ
![]() или плотность распределения амплитуды отраженного сигнала
или плотность распределения амплитуды отраженного сигнала ![]() ;
;
энергетический спектр
флюктуации отраженного сигнала ![]() ;
;
скорость
движения цели ![]() и ее составляющие (радиальная
скорость
и ее составляющие (радиальная
скорость ![]() , тангенциальная скорость
, тангенциальная скорость ![]() );
);
линейные размеры цели ![]() ;
;
априорное распределение целей в пространстве.
Все перечисленные характеристики в общем случае являются статистическими [30].Без знания этих характеристик целей невозможно решить целый ряд практически важных задач, например, оценить расчетным путем боевые возможности РЛС в конкретной воздушно-помеховой обстановке или предъявить требования к параметрам ее трактов и систем с достаточной точностью.
3.2. СТАТИСТИЧЕСКИЕ МОДЕЛИ ЦЕЛЕЙ
Статистические характеристики цели ![]() и
и ![]() могут
могут
быть определены по экспериментально
снятой диаграмме обратного вторичного излучения цели. Однако подобный путь
связан с большими
практическими трудностями. Поэтому при определении ![]() и
и ![]() в
большинстве случаев реальные цели заменяют моделями, статистические, характеристики которых близки к соответствующим характеристикам целей. Для уменьшения
многообразия все цели при анализе и синтезе
РЛС разбивают на пять видов
(моделей).
в
большинстве случаев реальные цели заменяют моделями, статистические, характеристики которых близки к соответствующим характеристикам целей. Для уменьшения
многообразия все цели при анализе и синтезе
РЛС разбивают на пять видов
(моделей).
Цели 1-го вида. К целям 1-го вида относятся цели без блестящей точки (без доминирующего отражателя) с медленными флюктуациями отраженных сигналов.
Под медленными
понимают такие флюктуации, ширина спектра ![]() которых удовлетворяет условию
которых удовлетворяет условию
![]() (3.1)
(3.1)
где ![]() — время однократного обзора зоны;
— время однократного обзора зоны;
![]() — частота
повторения зондирующих импульсов.
— частота
повторения зондирующих импульсов.
Физическая модель — совокупность большого числа произвольно расположенных в ограниченном объеме равноценных независимых вторичных излучателей, относительная скорость перемещения которых обеспечивает выполнение условия (3.1).
Плотность
распределения вероятности эффективной поверхности ![]() цели 1-го вида описывается
экспоненциальным законом
цели 1-го вида описывается
экспоненциальным законом
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.