Первая группа показателей качества обнаружения чаще всего используется в теории обнаружения и является наиболее общей. Вторая и третья группы используются, как правило, при решении практических задач.
4.2. ПОКАЗАТЕЛИ КАЧЕСТВА РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ В ТОЧКЕ
Вероятностью ложной тревоги в точке называют вероятность того, что шумовые выбросы, соответствующие одному и тому же разрешаемому объему зоны обнаружения, на входе устройства сравнения с порогом превысят порог обнаружения.
Значение вероятности ложной тревоги может быть определено либо аналитически, либо экспериментально.
Аналитический метод
определения используется при известной плотности распределения вероятности шума
на входе устройства сравнения с порогом ![]() . Значение вероятности ложной тревоги в точке может быть найдено по формуле
. Значение вероятности ложной тревоги в точке может быть найдено по формуле

где ![]() — порог принятия решения о наличии
цели.
— порог принятия решения о наличии
цели.
(4.1)
Вычисление значения![]() по формуле (4.1) соответствует вы-
по формуле (4.1) соответствует вы-
числению площади под кривой плотности распределения шума ![]() , лежащей справа от
, лежащей справа от ![]()
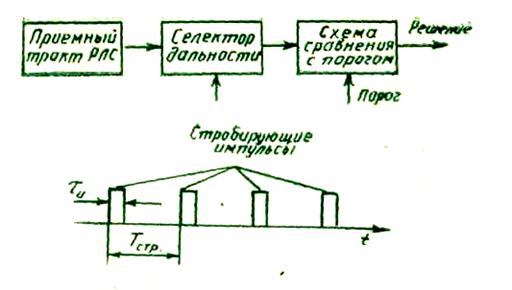
Рис. 4.1. Схема установки для экспериментального определения вероятности ложной тревоги
Схема, приведенная на рис. 4.1, при
остановленной антенне иллюстрирует сущность
экспериментального метода определения значения ![]() . Зная количество стробирующих
импульсов, поступивших на селектор дальности, вероятность ложной
тревоги можно определить как
. Зная количество стробирующих
импульсов, поступивших на селектор дальности, вероятность ложной
тревоги можно определить как
![]() (4.2)
(4.2)
где ![]() — общее число стробирующих
импульсов, определяющее
число независимых шумовых выбросов, поступивших на вход схемы сравнения с
порогом;
— общее число стробирующих
импульсов, определяющее
число независимых шумовых выбросов, поступивших на вход схемы сравнения с
порогом;
![]() — число
шумовых выбросов, превысивших порог обнаружения.
— число
шумовых выбросов, превысивших порог обнаружения.
Установим
связь вероятности ложной тревоги в точке с показателем ложных тревог ![]() . Для этого представим соотношение (4.2) следующим образом:
. Для этого представим соотношение (4.2) следующим образом:
![]() (4.3)
(4.3)
Знаменатель соотношения (4.3) можно трактовать как среднее число независимых шумовых выбросов на входе устройства сравнения с порогом, приходящихся на одну ложную тревогу. Это число и принято называть показателем ложной тревоги:
![]() (4.4)
(4.4)
С учетом (4.3) и (4.4)
![]() (4.5)
(4.5)
Вероятностью правильного обнаружения в точке называют вероятность того, что выбросы смеси сигнала и шума, соответствующие одному и тому же выделенному разрешаемому объему зоны обнаружения, на входе устройства сравнения с порогом превысят порог обнаружения.
Численное значение вероятности правильного обнаружения можно определить по формуле
где ![]() — плотность распределения вероятности
смеси сигнала и шума на входе устройства
сравнения с порогом. Вероятность правильного
обнаружения и ложной тревоги в точке
сравнительно слабо зависит от
особенностей построения приемного
тракта той или иной РЛС. Поэтому в подавляющем большинстве случаев кривые обнаружения и строятся для
этой группы показателей качества
обнаружения.
— плотность распределения вероятности
смеси сигнала и шума на входе устройства
сравнения с порогом. Вероятность правильного
обнаружения и ложной тревоги в точке
сравнительно слабо зависит от
особенностей построения приемного
тракта той или иной РЛС. Поэтому в подавляющем большинстве случаев кривые обнаружения и строятся для
этой группы показателей качества
обнаружения.
4.3. ПОКАЗАТЕЛИ КАЧЕСТВА РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЗА ОБЗОР
Вероятностью ложной тревоги за обзор Рлт3 называют вероятность того, что шумовые выбросы на входе устройства сравнения с порогом хотя бы один раз за один цикл обзора превысят порог обнаружения.
Установим связь вероятности ложной тревоги за обзор с вероятностью ложной тревоги в точке. Так как шумовые выбросы в разрешаемых объемах независимы, то вероятность ложной тревоги за обзор можно определить следующим образом:
 (4.7)
(4.7)
где ![]() — вероятность ложной тревоги в
— вероятность ложной тревоги в ![]() -м разрешаемом объеме;
-м разрешаемом объеме;
![]() — число
разрешаемых объемов в зоне обнаружения. При одинаковых значениях вероятности ложной тревоги, равных
— число
разрешаемых объемов в зоне обнаружения. При одинаковых значениях вероятности ложной тревоги, равных ![]() ,
во всех элементах разрешения из (4.6) следует
,
во всех элементах разрешения из (4.6) следует
![]() (4.7)
(4.7)
Если выполняется условие ![]() , то
, то
![]()
и соотношение (4.7) с достаточной для практики точностью можно представить в виде
![]() (4.8)
(4.8)
Понятие вероятности правильного обнаружения за обзор совпадает с понятием вероятности правильного обнаружения в точке. Поэтому
![]()
4.4. ПЕРИОД ЛОЖНОЙ ТРЕВОГИ
Как уже отмечалось, вероятность ложной тревоги в точке и показатель ложных тревог связаны между собой соотношением (см. (4.5))
![]()
Используем
записанное соотношение для выяснения связи вероятности
ложной тревоги с периодом ложной тревоги. Для этого умножим правую часть соотношения (4.5) на ![]() (здесь
(здесь![]() —число импульсов в пачке,
—число импульсов в пачке, ![]() —длительность
импульса на выходе приемника РЛС):
—длительность
импульса на выходе приемника РЛС):
![]() (4.9)
(4.9)
Произведение ![]() представляет
собой время, затрачиваемое на просмотр одного разрешаемого объема зоны обнаружения (при равномерном обзоре). Поэтому
знаменатель соотношения (4.9) можно трактовать
(с учетом сущности понятия показатель ложной тревоги) как среднее
значение интервала времени между двумя ложными
тревогами. Этот интервал времени и называют периодом ложной тревоги
представляет
собой время, затрачиваемое на просмотр одного разрешаемого объема зоны обнаружения (при равномерном обзоре). Поэтому
знаменатель соотношения (4.9) можно трактовать
(с учетом сущности понятия показатель ложной тревоги) как среднее
значение интервала времени между двумя ложными
тревогами. Этот интервал времени и называют периодом ложной тревоги ![]() :
:
![]() (4.10)
(4.10)
С учетом (4.10)
![]() (4.11)
(4.11)
Последнее
соотношение может быть использовано для перехода от вероятности ложной тревоги в точке к
периоду ложной тревоги
либо наоборот. Как следует из (4.11), для
вычисления значения ![]() должны быть известны такие
характеристики РЛС, как число импульсов в
пачке и длительность импульса. Допустимое значение периода ложных тревог
определяется требованием потребителя радиолокационной
информации и зависит от назначения РЛС:
должны быть известны такие
характеристики РЛС, как число импульсов в
пачке и длительность импульса. Допустимое значение периода ложных тревог
определяется требованием потребителя радиолокационной
информации и зависит от назначения РЛС:
4.5. ИНТЕГРАЛЬНЫЕ ВЕРОЯТНОСТИ ПРАВИЛЬНОГО ОБНАРУЖЕНИЯ И ЛОЖНОЙ ТРЕВОГИ
Интегральной вероятностью
правильного обнаружения ![]() и принято
называть вероятность того, что выбросы смеси сигнала и шума, соответствующие выделенному разрешаемому объему зоны обнаружения, превысят порог обнаружения хотя бы
один раз за m циклов обзора.
и принято
называть вероятность того, что выбросы смеси сигнала и шума, соответствующие выделенному разрешаемому объему зоны обнаружения, превысят порог обнаружения хотя бы
один раз за m циклов обзора.
Вероятность того, что
шумовые выбросы на входе устройства сравнения
с порогом хотя бы один раз за т циклов обзора превысят порог обнаружения, называется интегральнойвероятностью ложной тревоги![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.