В случае
малых отношений сигнал—шум логикой обнаружения, близкой к оптимальной, является логика ![]() из
из ![]() .
Вероятности обнаружения медленно и быстро
флюктуирующих целей при такой логике
.
Вероятности обнаружения медленно и быстро
флюктуирующих целей при такой логике
(3.6)
 (3.7)
(3.7)
Из соотношений (3.6) и (3.7) видно, что при малых отношениях сигнал—шум медленные флюктуации обеспечивают более высокую вероятность обнаружения по сравнению с быстрыми.
Очевидно, что существуют такие значения вероятности обнаружения, для обеспечения которых требуемое отношение сигнал— шум практически не зависит от характера флюктуации отраженного сигнала.
На рис. 3.3
представлены графики, количественно иллюстрирующие влияние ![]() и
и ![]() на качество обнаружения целей. Они подтверждают справедливость результатов анализа
и позволяют сделать весьма важный
практический вывод.
на качество обнаружения целей. Они подтверждают справедливость результатов анализа
и позволяют сделать весьма важный
практический вывод.
При вероятностях обнаружения, близких к 0,3 - 0,35
(например, 0,5), незнание вида плотности,
распределения вероятности ЭПЦ ![]() и
скорости флюктуации отраженного сигнала не приведет
к существенным ошибкам при расчете параметров PJIC и оценке ее боевых возможностей. При
вероятностях обнаружения, значительно больших
(0,3... 0,5), незнание этих характеристик может
привести к существенным ошибкам.
и
скорости флюктуации отраженного сигнала не приведет
к существенным ошибкам при расчете параметров PJIC и оценке ее боевых возможностей. При
вероятностях обнаружения, значительно больших
(0,3... 0,5), незнание этих характеристик может
привести к существенным ошибкам.
3.4. ОЦЕНКА СРЕДНЕГО ЗНАЧЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ
3.4.1. Точечные (сосредоточенные) цели
Кточечным относятся цели, размеры которых значительно меньше соответствующих размеров импульсного объема РЛС. Среднее значение эффективной поверхности точечных целей определяется экспериментально. В табл. 3.1 приведены средние значения эффективной поверхности некоторых радиолокационных целей.
Таблица 3.1
|
Радиолокационная цель |
Средняя эффективная поверхность цели, м2 |
|
Стратегический бомбардировщик Истребитель-бомбардировщик Истребитель Крылатая ракета |
10—20 5—15 1—5 До 0,8 |
Первая цифра в таблице соответствует сантиметровому диапазону волн, вторая — метровому. Увеличение среднего значения эффективной поверхности цели с увеличением длины волны объясняется возникновением резонансного отражения от элементов цели, размеры которых оказываются соизмеримыми с длиной волны.
Кроме перечисленных в таблице, существует большое число объектов, создающих пассивные помехи РЛС и относящихся к точечным целям, например, здания, водонапорные башни, телевизионные вышки и т. д. Типичные значения ЭПЦ таких целей составляют от 103до 104 м2.
3.4.2. Распределенные цели
Краткая характеристика распределенных целей. К распределенным относятся цели, размеры которых соизмеримы или превышают соответствующие размеры импульсного объема РЛС.
Для наземных РЛС распределенными целями являются облака дипольных отражателей, метеообразования и поверхность земли, т. е. источники пассивных помех. Поэтому знание их эффективной поверхности весьма важно для определения возможностей РЛС по обнаружению целей в условиях ПП. Облака ДО и метеообразования относятся к объемно-распределенным целям, а поверхность земли — к поверхностно-распределенным.
Рассмотрим методику оценки среднего значения эффективной поверхности таких целей.
Облако
дипольных отражателей. Одним
из способов постановки
пассивных помех РЛС является периодическое сбрасывание пачек ДО с самолета или другого
летательного аппарата. Если пачки сбрасываются достаточно часто, формируемые ими облака сливаются друг с другом, в результате
чего образуются довольно широкие
и протяженные области пространства, внутри которых хаотически разбросаны дипольные
отражатели. Такие области пространства часто
называют полосами пассивных помех или дипольных
отражателей. Применительно к полосам ДО, поставленным для наземных РЛС обнаружения, наиболее важной
является характеристика разлета
диполей в направлении, перпендикулярном
оси полосы, поскольку при таком разлете изменяется ширина полосы ![]() и уменьшается средняя концентрация диполей в импульсном объеме, а следовательно, и среднее
значение суммарной эффективной
поверхности ДО, попадающих в импульсный объем
и уменьшается средняя концентрация диполей в импульсном объеме, а следовательно, и среднее
значение суммарной эффективной
поверхности ДО, попадающих в импульсный объем ![]() . Разлет диполей в направлении оси
полосы и в вертикальной плоскости
практически не приводит к изменению
. Разлет диполей в направлении оси
полосы и в вертикальной плоскости
практически не приводит к изменению ![]() . При разлете диполей в направлении оси полосы не
изменяется средняя концентрация
диполей вследствие того, что поток ДО из одного облака в другое компенсируется встречным потоком дипо-
. При разлете диполей в направлении оси полосы не
изменяется средняя концентрация
диполей вследствие того, что поток ДО из одного облака в другое компенсируется встречным потоком дипо-
лей из второго облака в первое. При разлете в вертикальной плоскости диполи обычно не выходят из импульсного объема РЛС, так как диаграммы направленности РЛС обнаружения в угломестной плоскости, как правило, широкие.
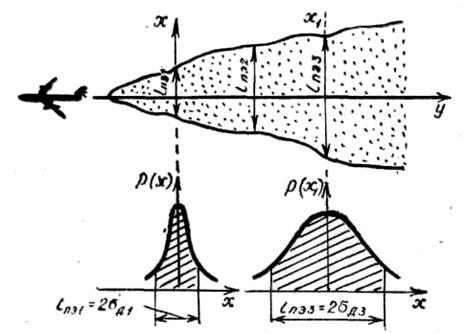
Рис. 3.4 дает качественную картину
изменения концентрации ДО
во времени в точке раскрыва пачки от координаты ![]() ,
перпендикулярной оси
[19].
,
перпендикулярной оси
[19].
|
|
|
Рис. 3.4. Процесс развития облака дипольных отражателей в пространстве Ширина полосы ДО вначале увеличивается, а затем уменьшается по мере падения части ДО на землю. Можно показать, что при движении постановщика ПП в радиальном и тангенциальном направлениях среднее значение эффективной поверхности ДО в импульсном объеме РЛС определяется соответственно выражениями: (3.8) (3.9) где
пачки ДО; |
![]() —
дальность до выделенного импульсного объема в облаке ДО;
—
дальность до выделенного импульсного объема в облаке ДО;
![]() —интеграл вероятности;
—интеграл вероятности;
![]() — коэффициент, учитывающий разрешающую способность РЛС по углу места; этот коэффициент равен единице,
если
— коэффициент, учитывающий разрешающую способность РЛС по углу места; этот коэффициент равен единице,
если ![]() ;
;
![]() — угловой размер облака
ПП в вертикальной плоскости.
— угловой размер облака
ПП в вертикальной плоскости.
Метеообразования. Для оценки эффективной поверхности метеообразований вводится понятие удельной отражающей поверхности единичного объема метеообразований. Под этим понятием подразумевается среднее значение эффективной поверхности метеообразований единичного объема.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.