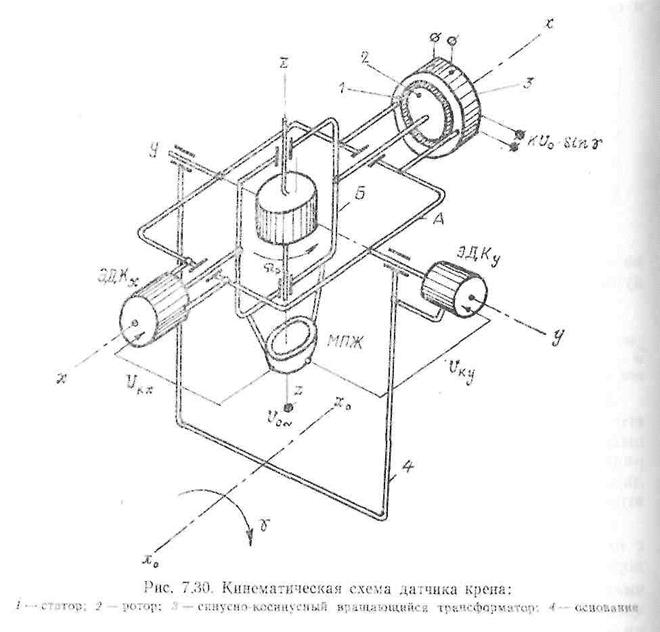
Ротор гироскопа при колебаниях основания датчика, закрепленного на башне, стремится сохранить направление своей оси zz в пространстве. При поворотах основания датчика вокруг оси хх на угол поперечного крена у внутренняя рамка Б гироскопа и связанный с ней ротор 2 синусио-косинусного вращающегося трансформатора 3 сохраняют направление своих осей, а наружная рамка А и связанный с ней статор 1 этого трансформатора поворачиваются вместе с основанием 4. В результате происходит
|
|
|
|
поворот статора относительно ротора на угол у, а на выходе датчика возникает электрическое напряжение
Uγ = KUпsin γ = Кγ sin γ , где К — передаточный коэффициент ВТ; U0— напряжение питания ВТ; K; = K-U0— коэффициент преобразования крена в напряжение.
Датчик крена имеет систему коррекции, которая устраняет завалы внутренней и наружной рамок в процессе работы датчика крена вследствие перегрузок, остаточной неуравновешенности рамок и других факторов.
Каналы продольной и поперечной коррекции датчика включают в себя жидкостный маятниковый переключатель (датчик) коррекции МП Ж и два моментных коррекционных электродвигателя ЭДКу и ЭДКх, которые управляются МПЖ- Жидкостный маятниковый переключатель представляет собой двухшюскостной электрический пузырьковый уровень. При отклонении оси гироскопа от направления истинной вертикали, например, относительно оси хх соответствующий канал МПЖ фиксирует отклонение и подает сигнал к коррекционному двигателю ЭДКУ> который прикладывает к гироскопу соответствующий момент, заставляющий гироскоп перемещаться в силу закона прецессии кратчайшим путем к направлению истинной вертикали. Аналогичным образом работает канал продольной коррекции.
Максимальная погрешность измерения наклона оси цапф пушки описанным датчиком в условиях динамических возмущений — не более 1°.
Датчик крена устанавливается в башне так, чтобы измерительная ось хх совпадала с продольной осью башни, а ось уу (ось наружной рамки) была параллельна оси цапф пушки, при этом датчик будет измерять поперечные крены башни с установленной в ней пушкой. Напряжение ^(sirryc) с выхода датчика поступает в ТБВ, где с его помощью углы а и р\ вычисленные для горизонтального положения корпуса танка, корректируются с учетом угла уб крена оси цапф пушки, т. е. преобразуются в углы ая и р\.Функциональная схема и принцип работы ТББ. С учетом гипотезы о равномерном и прямолинейном движении цели за время полета снаряда на упрежденную дальность вектор линейного упреждения У можно заменить произведением vatn, где vn — вектор скорости движения цели; /„ — время полета снаряда до упрежденной точки (при неподвижном стреляющем танке).
При стрельбе из движущегося танка в алгоритмах вычисления αЕ и βЕ учитывается также переносная скорость стреляющего танка, влияющая на траекторию полета снаряда, так как в этом случае вектор vmскорости вылета снаряда из пушки равен:
Исн = и0- иг.
где u0— вектор скорости вылета снаряда из неподвижного танка; uт — вектор скорости танка.
Для упрощения аппаратурной реализации решения задачи встречи снарядов с целью в кинематических уравнениях вместо линейных скоростей uaи иг используются относительные угловые скорости наводки линии визирования, вырабатываемые в процессе слежения за движущейся целью (ωт и ωс в плоскостях вертикальной и горизонтальной паводки соответственно) и обусловленные движением стреляющего танка и цели.
ТБВ входит в состав СУО танка с ГТД. Алгоритмы вычисления углов а2 и Ра, реализованные в ТБВ, получены с учетом ряда допущений и упрощений, принятых на основе анализа уровня методических погрешностей по сравнению с другими погрешностями стрельбы и влияния их на точность стрельбы: в них не учитываются угол места цели е, относительная угловая скорость цели u,) в плоскости ВН, индивидуальные углы вылета снарядов разных типов, конструктивный параллакс прицела и пушки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.