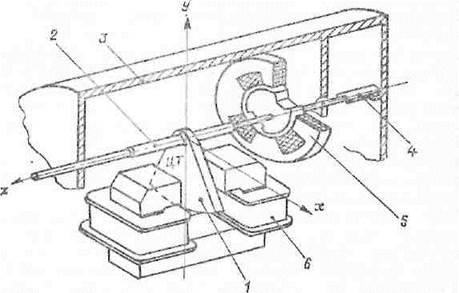
Рис. 7.25. Датчик линейных ускорений:
/ — маятник; 2 — ось; 3 — корпус; 4 — центрирующий торсион; 5 — вращающийся трансформатор; 6 — электромагнитный демпфер
Индуктивный датчик ДИ (см. рис. 7.23) предназначен для измерения давления в рабочих полостях гидромотора большого момента и выработки электрического сигнала, обеспечивая обратную связь по давлению.
Работа приводов наводки и стабилизации. Наряду со стабилизацией и наводкой пушки в обеих плоскостях в режиме «Автомат» обеспечивается приведение пушки на угол заряжания и снятие ее с этого угла, гидростопорение и торможение при большой скорости ее движения, разгрузка приводного электродвигателя насоса гидроусилителя при выходе линии визирования за пределы углов наводки пушки в вертикальной плоскости.
При движении танка по неровной местности корпус и башня совершают колебания. Моменты трения в цапфах и неуравновешенность пушки относительно цапф приводят к отклонению пушки от заданного положения, в результате чего в гиростабилизаторе (с помощью ВТВ) и гиротахометре формируются сигналы, пропорциональные углу рассогласования пушки с прицелом и абсолютной угловой скорости пушки. Эти сигналы поступают на вход электронного усилителя ЭУ (см. рис. 7.22), где суммируются, усиливаются по напряжению и мощности, а затем суммарный сигнал подводится к обмоткам управления электромагнита механизма управления. В зависимости от амплитуды и фазы управляющих напряжений в электромагните формируются разные по значению магнитные потоки, вызывающие поворот коромысла 1 и соответствующее перемещение золотников 2 гидроусилителя, что приводит к перераспределению потока рабочей жидкости и созданию перепада давления в полостях цилиндра ЦИ и момента стабилизации пушки.
Приведение п у ш к и на угол заря ж а н и я осуществляется при нажатии кнопки «Заряжание». На вход электронного усилителя с помощью прибора приведения подается электрический сигнал приведения на углы заряжания. В этом положении пушка фиксируется электромеханическим стопором. После заряжания пушки ее клин закрывается и включает привод наводки и стабилизации. Пушка снимается со стопора и переводится в режим слежения за прицелом.
Наводка и стабилизация башни с пушкой. Формирование управляющего сигнала и усиление его в электронном усилителе осуществляются принципиально так же, как и в приводе вертикальной наводки, за исключением того, что в рассматриваемом приводе для компенсации моментных возмущений башни в поперечной плоскости дополнительно применен датчик линейных ускорений. Управляющий сигнал от электронного усилителя подводится к обмотке электромагнита 4 (см. рис. 7.23) гидроусилителя, где он с помощью заслонки 5 преобразуется в разность давлений рабочей жидкости в соплах, а затем усиливается в двух ступенях гидроусилителя до значения, достаточного для поворота наклонной шайбы гидронасоса. Рабочая жидкость из гидронасоса под давлением поступает в цилиндры гидромотора большого момента, вызывая вращение ротора и поворот башни.
В режиме наводки поворот башни осуществляется по сигналу от пульта управления, а в режиме стабилизации — по сигналам от вращающегося трансформатора ВТГ датчика угла, статор которого связан с пушкой (башней). Наводка пушки в горизонтальной плоскости с перебросочной скоростью осуществляется при повороте корпуса пульта управления до упора, в результате чего на обмотку электромагнита наведения подается полное напряжение бортовой сети.
В режиме «Полуавтомат» в качестве усилителя используется вибрационный усилитель ВУ (см. рис. 7.23, б), работающий в вибрационном режиме. Полуавтоматическая наводка пушки (башни) в плоскости ГН производится поворотом корпуса пульта управления прицела, в результате чего в обмотку реле виброусилителя подается управляющее напряжение. В качестве главной обратной связи используются потенциометры ПОС и два индуктивных датчика ДИ, обеспечивающие повышение коэффициента усиления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.