Одновременно с наведением стабилизированной линии прицеливания с помощью исполнительного привода, управляемого сигналом вращающегося трансформатора ВТВ, будет наводиться пушка (она будет следить за наружной рамой гироскопа). При выключенном приводе стабилизатора оружия система обеспечивает только стабилизацию линии прицеливания.
Для уменьшения ошибок гиростабилизатора его основание механически связывается с орудием параллелограммным механизмом 8, В этом случае основание гироскопа колеблется вместе со стабилизированным орудием, а не вместе с корпусом прицела. 'Гак как углы поворота орудия в стабилизированном режиме намного меньше углов поворота корпуса, то погрешность гиростабилизатора соответственно уменьшается.
«Силовая» стабилизация линии прицеливания в плоскости ГН осуществляется так же, как в ВН, и в этом случае силовой гиростабилизатор устанавливается так, чтобы ось его наружной рамки была перпендикулярна плоскости стабилизации.
С помощью специальной передачи с передаточным отношением 1 : 1 наружная рамка связывается с нижним (базовым) зеркалом перископического прицела. Благодаря этому при работе системы нижнее зеркало поворачивается вокруг оси 030'3 (см. рис. 7.19) па угол, равный и противоположный по знаку углу колебаний основания (башни или корпуса) в плоскости ГН. Луч, отраженный нижним зеркалом, всегда будет направлен по оси 030'3, т. е. по оптической оси прицела. Для одновременной стабилизации линии прицеливания в двух плоскостях применяют либо два отдельных гироскопа (раздельная стабилизация), либо специальные гироскопические приборы — двухплоскостные гирорамы.
Двухплоскостной силовой гиростабилизатор поля зрения (рис. 7.20) прицела ПДПС включает в себя двухплоскостную (двухкомпонентную) гирораму, установлен в корпусе прицела так, чтобы ось уу была параллельна оси цапф пушки, а ось хх лежала в плоскости, параллельной оси канала ствола (при нулевых исходных установках стрельбы). На платформе гирорамы 1 установлены два двухстепенных гироскопа Гп и ГГ. Платформа размещена в раме наружного подвеса, а рама смонтирована на подвижном основании гирорамы 3, установленном в корпусе прицела. Подвижное основание соединено параллелограммным механизмом с орудием. Рама и платформа могут поворачиваться относительно осей у и z.
Кинематическая схема подвеса двухстепенных гироскопов при показанной на рис. 7.20 ориентации их кинетических моментов Нг и Яв обеспечивает стабилизацию платформы в плоскости ГН, а рамы — в плоскости ВН. Диаметры шкивов Ш1 и Ш2 соотносятся как 1:2 (аналогично прицелам ТПД-К1 и ТПД2-49). Передаточное число механического привода от платформы к нижнему зеркалу НЗ равно единице. Следовательно, угол поворота ВЗ относительно основания прибора будет равен фвз =—фк/2, а угол поворота нижнего зеркала будет равен и противоположен по знаку углу поворота корпуса прибора в плоскости ГН.
Управление положением зеркал при наводке осуществляется изменением пространственной ориентации рамы и платформы гирорамы. Для этого используется свойство прецессии гироскопов.
Схема управления включает в себя потенциометры, расположен ные в пульте управления, усилители и момептиые электродвигатели 2 и 5.
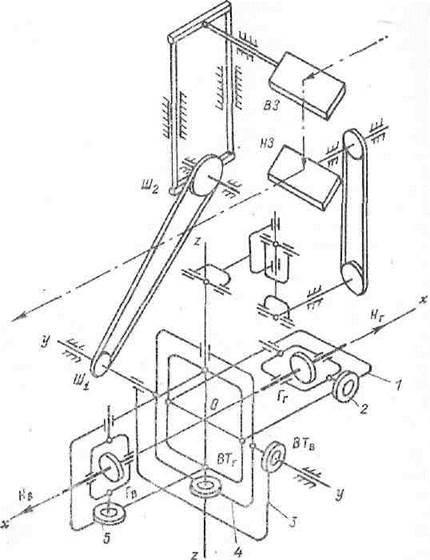
Рис. 7.20. Схема двухплоскостного силового гиростабилизатора поля зрения
(линии прицеливания): / — платформа гирорамы; 2, 5 — моментные электродвигатели; 3 — гнрорама; 4 — рама наружного подвеем
Электродвигатели создают моменты, воздействующие на рамки двухстепенных гироскопов. Момент электродвигателя 5 приводит к возникновению гироскопического момента в плоскости xoz, воздействующего на раму наружного подвеса 4 и вызывающего ее прецессионное движение. Скорость прецессии пропорциональна приложенному к внутренней раме гироскопа Гв моменту. Изменение угловой скорости рамы, а следовательно, и линии прицеливания в зависимости от угла поворота пульта обеспечивается нелинейной характеристикой потенциометра в пульте управления. Наводка линии прицеливания в плоскости ГН осуществляется аналогичным способом с помощью электродвигателя 2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.