|
|
![]() r
и пропорционально линейной скорости перемещения танка vT: U(vT)=Kv-vr, где Kv—
передаточный коэффициент тахогенератора.
r
и пропорционально линейной скорости перемещения танка vT: U(vT)=Kv-vr, где Kv—
передаточный коэффициент тахогенератора.
|
Автоматические датчики
входной информации. Кроме дальномера, к этим датчикам относятся датчик
линейной скорости танка и датчик курсового угла танка. В качестве датчика
линейной скорости движения танка применен тахогенератор постоянного тока
типа ТГП-1, который установлен внутри оси правого направляющего колеса и
связан с ним через редуктор (для всех современных отечественных танков).
Напряжение на выходе датчика зависит от частоты вращения тахогенератора |
В качестве датчика курсового угла qrдвижения танка относительно цели применен косинусный потенциометр, установленный на кронштейне карданного привода командирской башенки. Его корпус жестко связан с корпусом тайка, а движок механически связан с башней танка. На обмотку косинусного потенциометра подается напряжение U(vT) с выхода тахогенератора. При этом сигнал на выходе датчика курсового угла равен:
U (βT cos qT) = U (vT) cos qT == Kv vT cos qr.
В ТБВ напряжение U {vro.osq.r) преобразуется в цифровой код изменения дальности AL.
Датчик ветра. При измерении скорости и направления ветра на движущейся машине необходимо учитывать воздействие на чувствительный элемент датчика как механических возмущений, так и внешней среды (пыль, грязь, атмосферные осадки), его ограниченный габарит и искажения воздушного потока конструктивными элементами башни.
Обычные метеорологические датчики ветра («флюгарки») с учетом этих требований неприемлемы для танков и БМП. Поэтому в танковых СУО используются методы, основанные на выделении ортогональных составляющих вектора скорости ветра. В настоящее время известно несколько таких методов, в частности: 1) метод выделения боковой составляющей скорости ветра с помощью спрямляющей решетки, 2) термоэлектрический и 3) метод ионного анемометрирования, основанный на измерении дисбаланса напряжений или токов между электродами вследствие изменения скорости движения ионов из-за движения воздуха (при наличии боковой составляющей ветра).
В конструктивной схеме для первого метода (рис. 7.29) датчик представляет собой цилиндрический корпус /, с обеих сторон которого встроены опоры 5. На одной из опор закреплен электромеханический анемометр 3 винтового типа с тахогенератором 2, преобразующий аэродинамическое давление воздушного потока в электрический сигнал. Вторая опора по своей форме зеркально повторяет первую. В результате достигается равенство аэродинамических условий для воздушного потока внутри корпуса справа и слева. Каждая опора на торце имеет спрямляющую решетку 4,
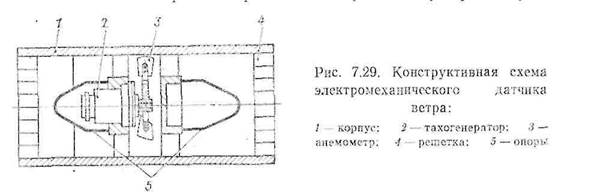
которая совместно с обтекателем обеспечивает равномерный воздушный поток:
|
|
|
|

На танке датчик ветра закрепляется таким образом, чтобы его продольная ось была параллельна оси цапф пушки; при этом Выделяется боковая составляющая ветра, влияющая на снос снаряда. В нерабочем состоянии входные отверстия датчика закрыты днумя крышками с автоматическим приводом (крышки открываются в момент заряжания пушки и закрываются после выстрела).
Скорость вращения
тахогенератора и напряжение, снимаемое г пего, пропорциональны скорости
воздушного потока wtвнутри
корпуса:![]() , где Кдв —передаточный
коэффициент датчика ветра. Требуемая точность измерения величины w6обеспечивается при достаточно больших размерах
датчика (диаметре цилиндрического корпуса) и высоте установки от башни (не
менее 0,3.. .0,4 м), что является существенным недостатком данного меnjда.
, где Кдв —передаточный
коэффициент датчика ветра. Требуемая точность измерения величины w6обеспечивается при достаточно больших размерах
датчика (диаметре цилиндрического корпуса) и высоте установки от башни (не
менее 0,3.. .0,4 м), что является существенным недостатком данного меnjда.
Датчик крена оси цапф пушки. Датчик крена служит для измерения поперечных углов наклона оси цапф пушки относительно плоскости горизонта оружия и преобразования их в электрический сигнал. Он представляет собой гировертикаль (рис. 7.30), выполненную на основе трехстепенного гироскопа с плоскостной коррекцией относительно вертикали места.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.